规划模块
全局规划 - Astar方法
注意
估计器参数PX4_ESTIMATOR默认是ekf2_vision,估计器参数选择可选ekf2_vision和ekf2_gps,ekf2_gps 使用GPS作为定位来源,ekf2_vision 使用外部输入(gazebo真值、slam等)作为定位来源
1.室内仿真
注意
此场景下的估计器参数PX4_ESTIMATOR是ekf2_vision,ekf2_vision 使用外部输入(gazebo真值、slam等)作为定位来源
在终端输入以下命令
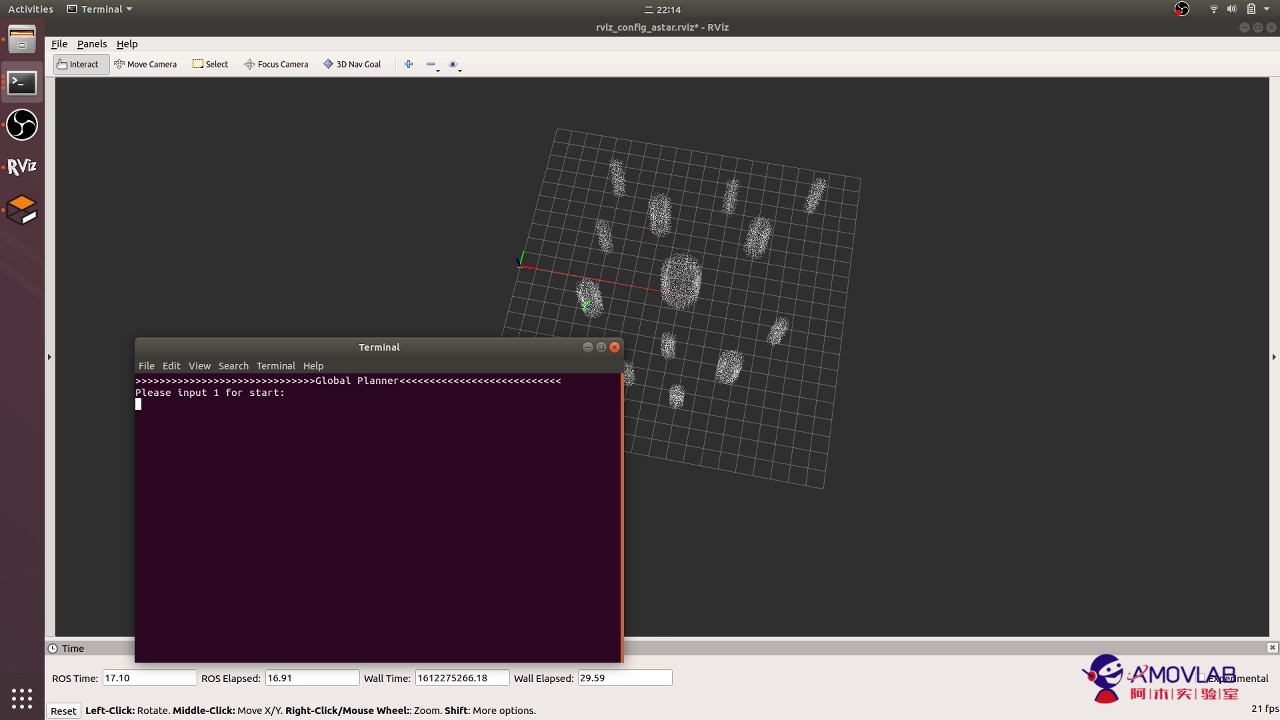
roslaunch prometheus_gazebo sitl_astar_2dlidar.launch
小技巧
应用启动后如上图所示,其中被蓝框圈中的是控制终端。根据提示,输入1选择开始
小技巧
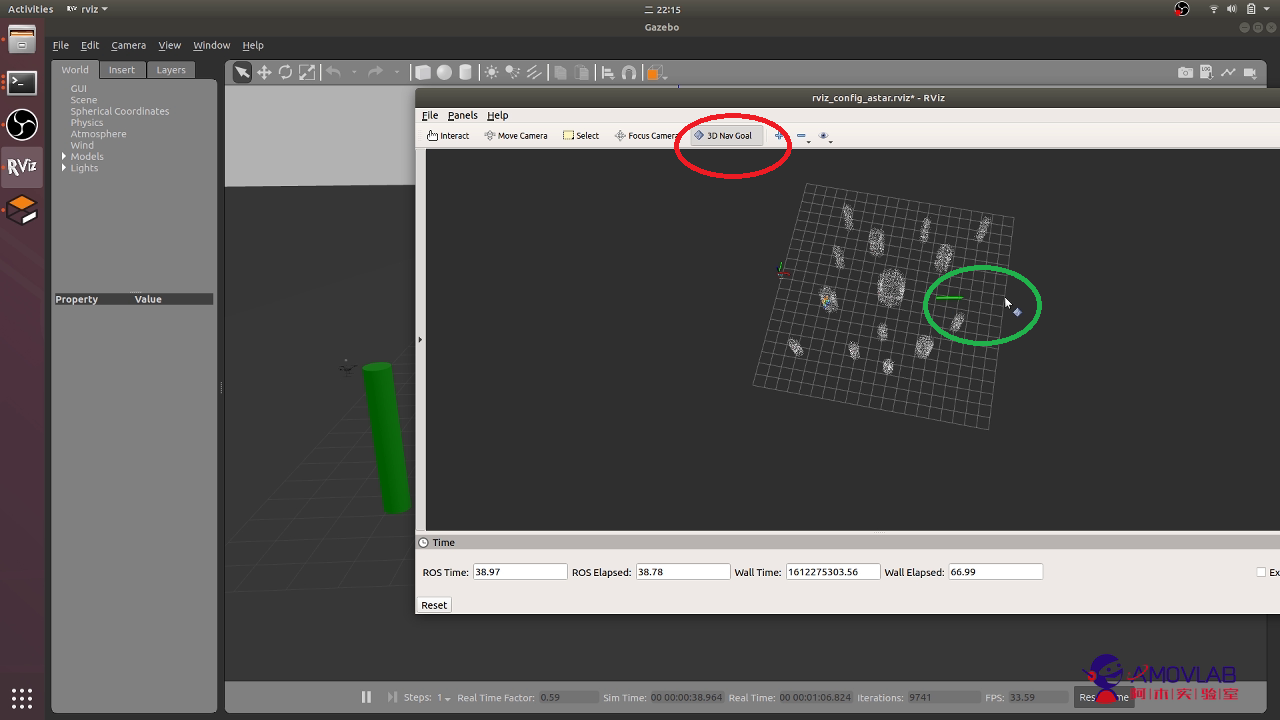
点击 3D Nav Goal 按钮(红圈),然后鼠标左键点击地图不放再点击右键往上下滑动(为了确定目标点高度),同时松开鼠标按键,无人机开始自动规划路径。
演示视频
2.室外仿真
注意
此场景下的估计器参数PX4_ESTIMATOR是ekf2_gps,ekf2_gps 使用GPS作为定位来源
注意
控制方式与室内仿真一样