使用手册
1.基本准备
因为跟前文类似,这里就不在赘叙,需要的可以点击下面链接自行查看。
2.初级功能
室内vins定点飞行
注意
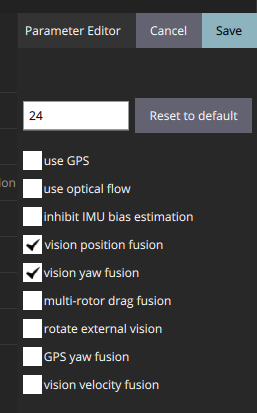
- 在室内操作时,注意在QGC地面中查看自己的位置源是否更改,参数EKF2_AID_MASK设定如下图,EKF2_HGT_MODE设定为Vision。
启动脚本
先启动D435i相机
roslaunch realsense2_camera rs_camera.launch

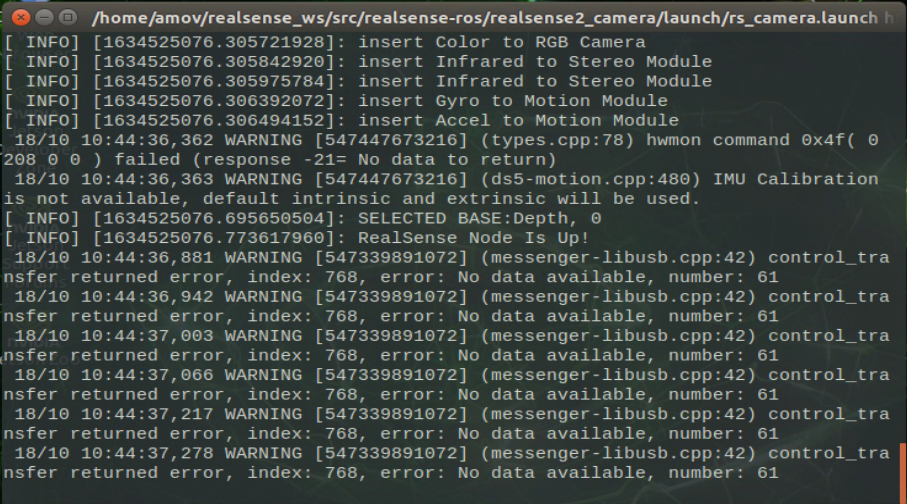
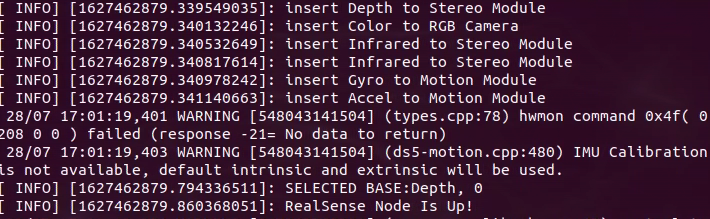
D435i相机正常启动的终端界面
再启动vins的节点
rosrun vins vins_node ~/VINS_FUSION/src/VINS-Fusion/config/realsense_d435i/realsense_stereo_imu_config.yaml

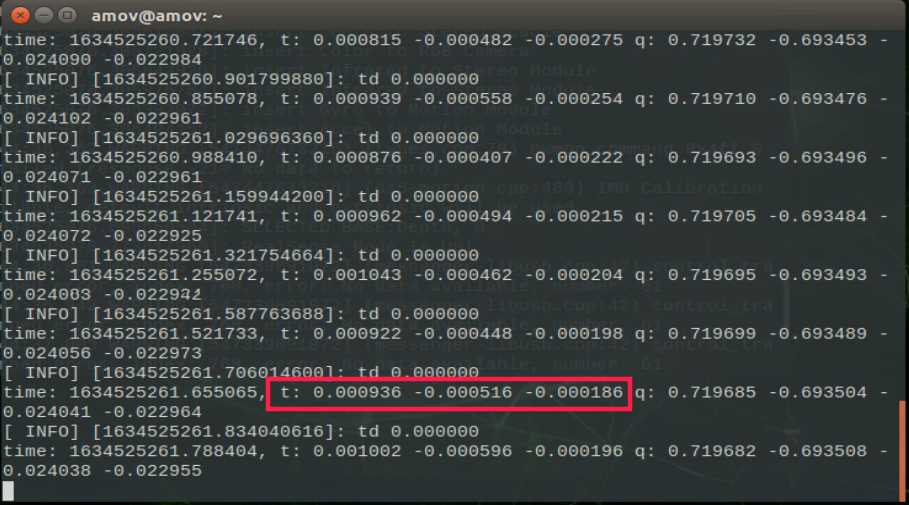
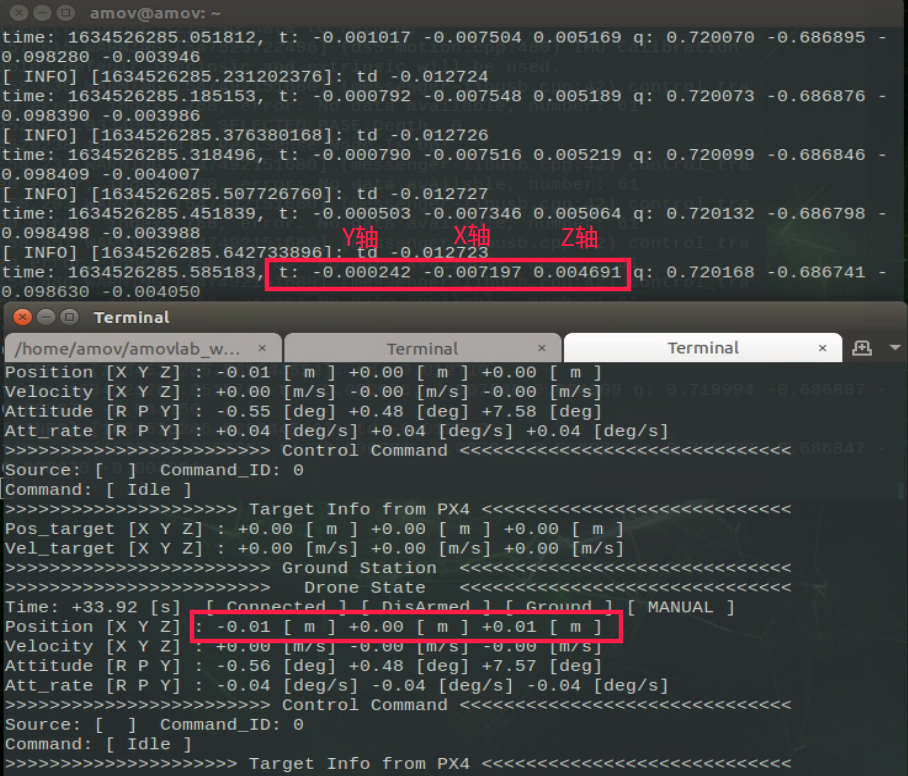
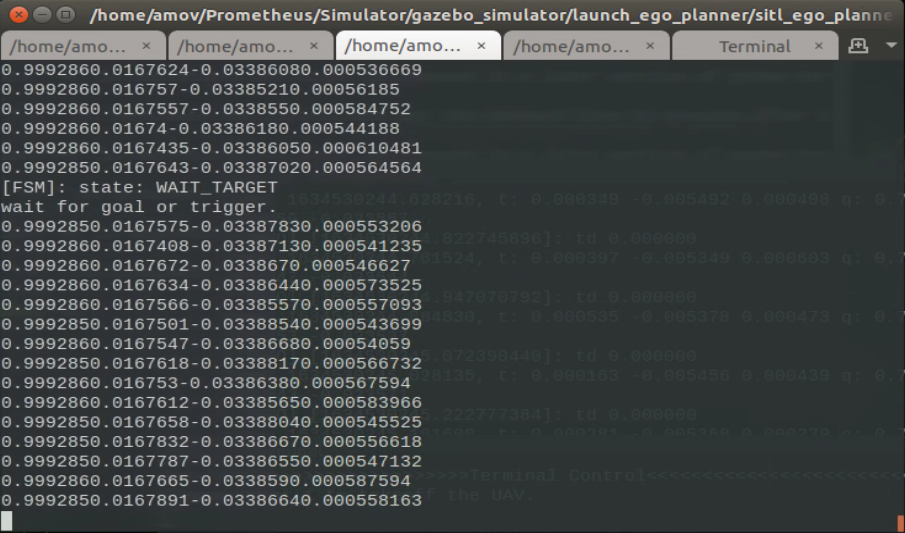
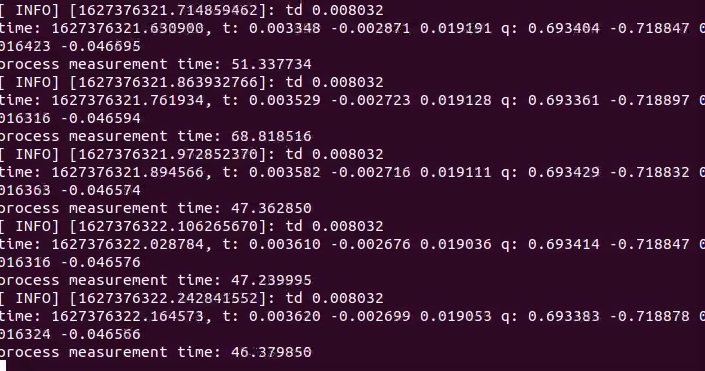
vins节点正常启动界面,红框部分为实时vins定位数据,分别为y、x、z 轴实时定位数据
vins正常启动,为p230提供准确的定位数据来源后,即可启动vio脚本
roslaunch p230_experiment p230_vio_onboard_vins.launch

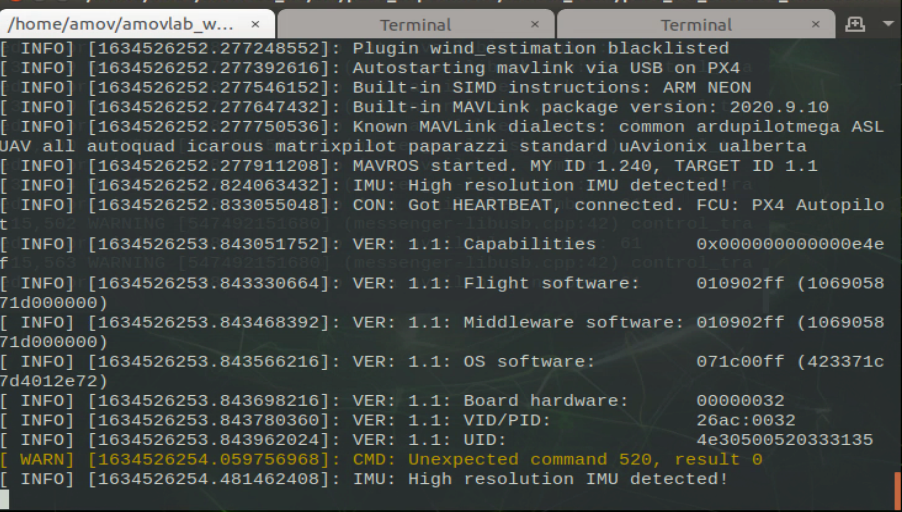
启动脚本后如下图所示
然后遥控器定点模式下解锁飞机起飞即可。
检查各项数据是否正常
在启动脚本后,首先查看地面站,地面站上会显示飞机的航向为正东,就是“E”。
第一个终端正常情况下如下图所示,各项数据均正常
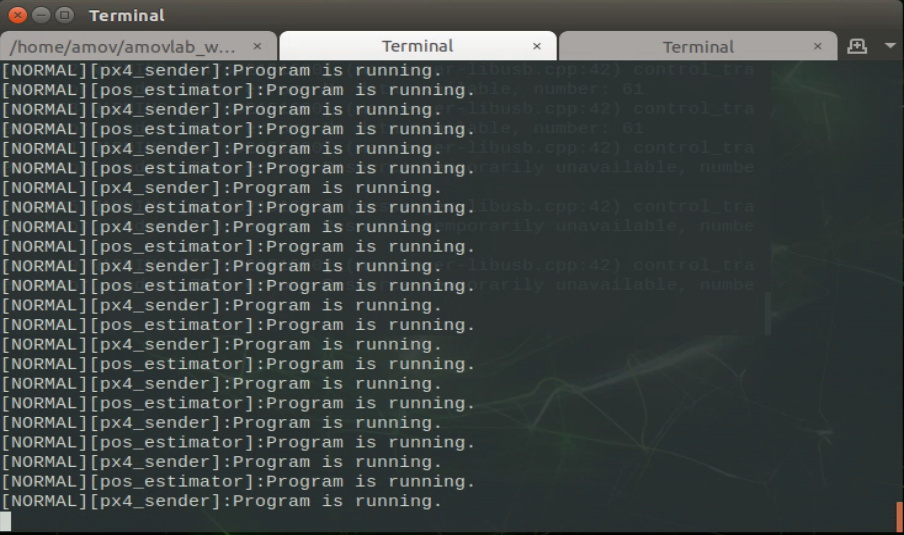
第二个终端如下图所示,显示“Program is running”即表示脚本正常运行。
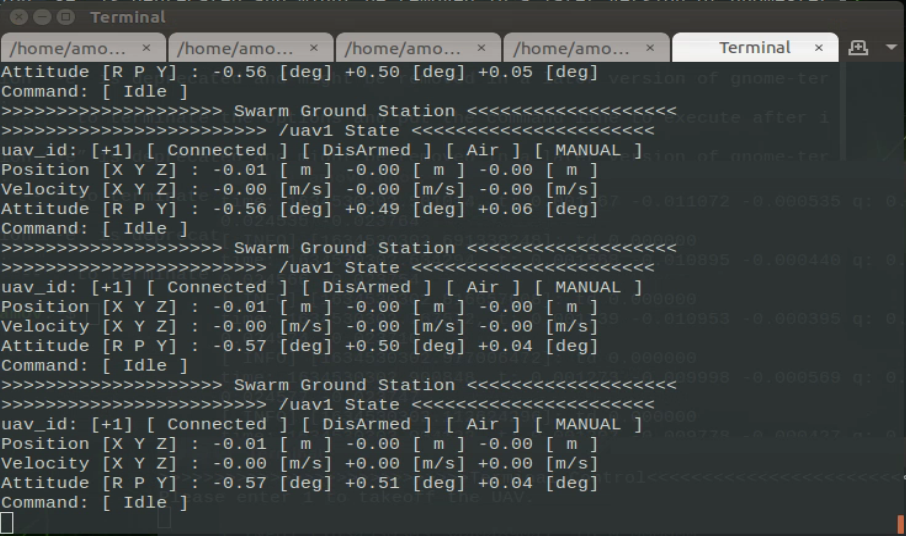
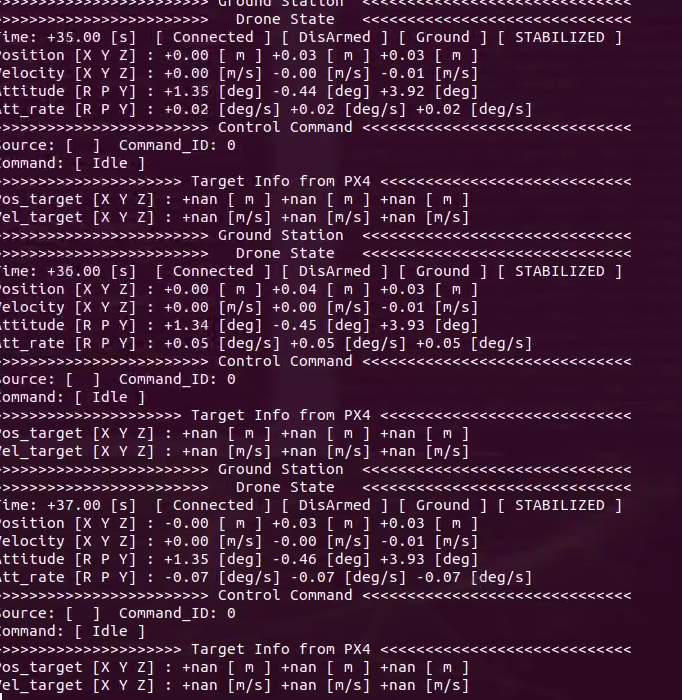
第三个终端如下图所示,查看飞机的位置、速度、角度与角速度信息是否正常,移动飞机,查看飞机的位置信息是否正常,飞机向前为X轴正方向,向左为Y轴正方 向,向上为Z轴正方向。飞机的定位数据应与vins终端的数据一致。
遥控器定点模式飞行
如下图所示,将“SWC”开关拨到中间一档, 切到“定点模式”

然后左手“右下”解锁飞机,如下图所示。

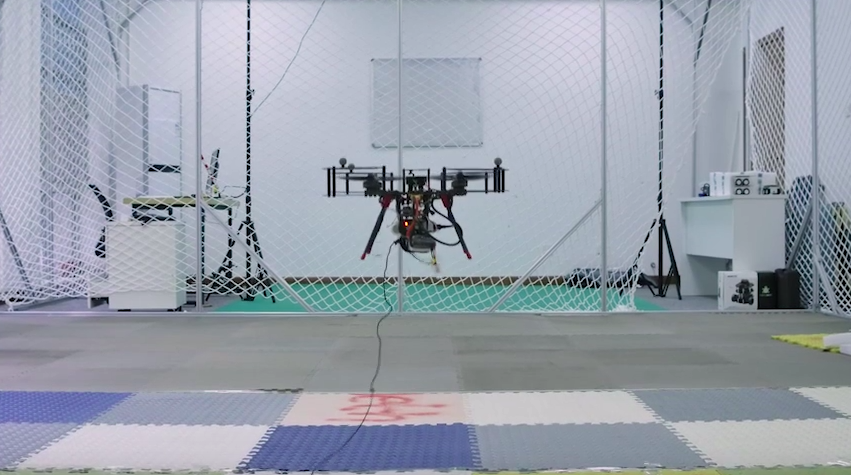
起飞后如下图所示,进行定点模式飞行。
降落
我们轻轻将油门杆推到最低,飞机降落后,等待飞机上锁即可。
视频演示
室内vins指点飞行
本节主要讲解P230系列无人机在室内的指点飞行演示。视频紧接上节内容 指点飞行 ,默认已经连接到QGC地面站和nomachine远程连接到板载计算机, 主要分为一下几点进行讲解:启动指令,命令行控制终端详解,起飞,指点飞,以及最后的视频演示。
注意
受限于开源飞控硬件性能,飞机在长时间不用后会出现位姿漂移,要求每次飞行前电池重新上电以重启飞控和板载计算机,并严格按照wiki规范操作,避免炸机风险。
启动指令
注意
- 在室内操作时,注意在QGC地面中查看自己的位置源是否更改,参数EKF2_AID_MASK设定如下图,EKF2_HGT_MODE设定为Vision。
-
先启动D435i相机
roslaunch realsense2_camera rs_camera.launch
D435i相机正常启动的终端界面
再启动vins的节点
rosrun vins vins_node ~/VINS_FUSION/src/VINS-Fusion/config/realsense_d435i/realsense_stereo_imu_config.yaml
vins节点正常启动界面,红框部分为实时vins定位数据,分别为y、x、z 轴实时定位数据
vins正常启动,为p230提供准确的定位数据来源后,即可启动vio脚本
roslaunch p230_experiment p230_vio_onboard_vins.launch
启动脚本后如下图所示
然后再启动控制脚本
roslaunch p230_experiment p230_vio_control.launch
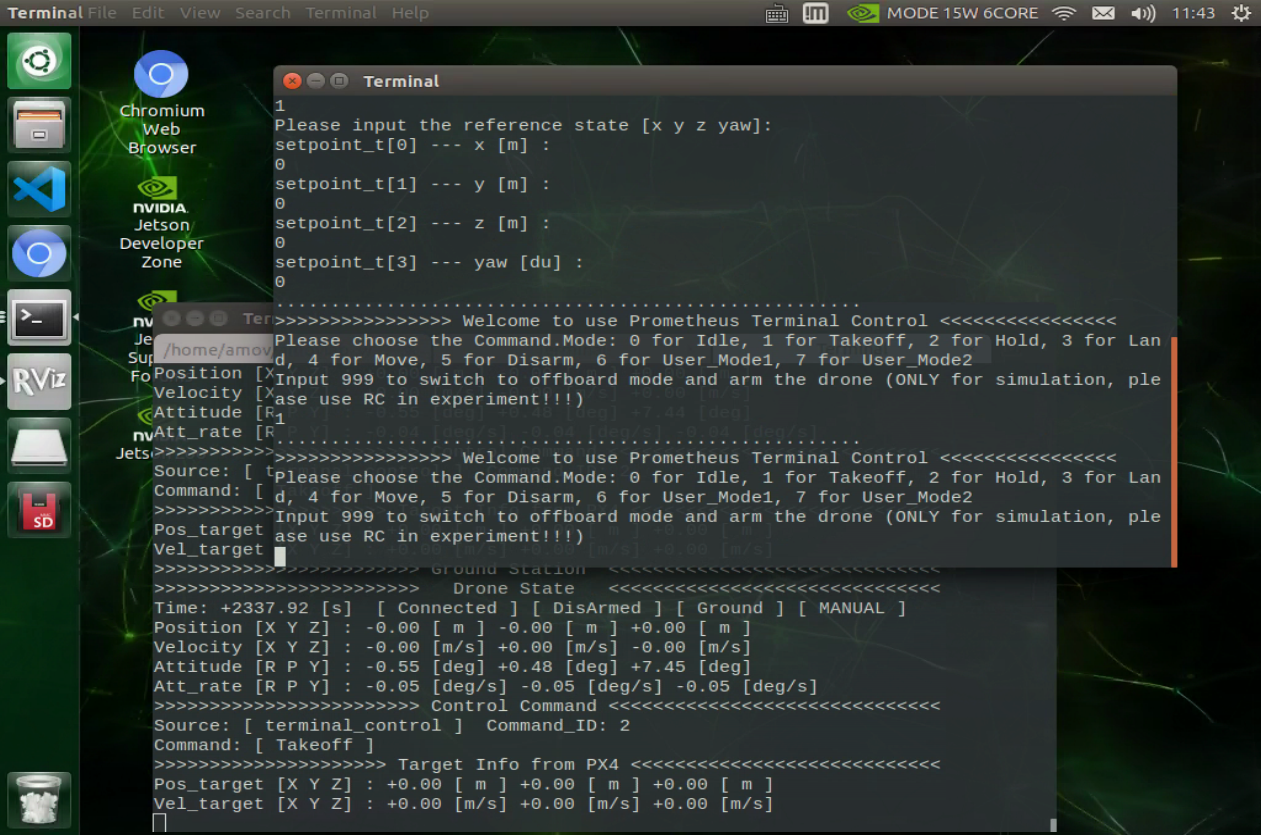
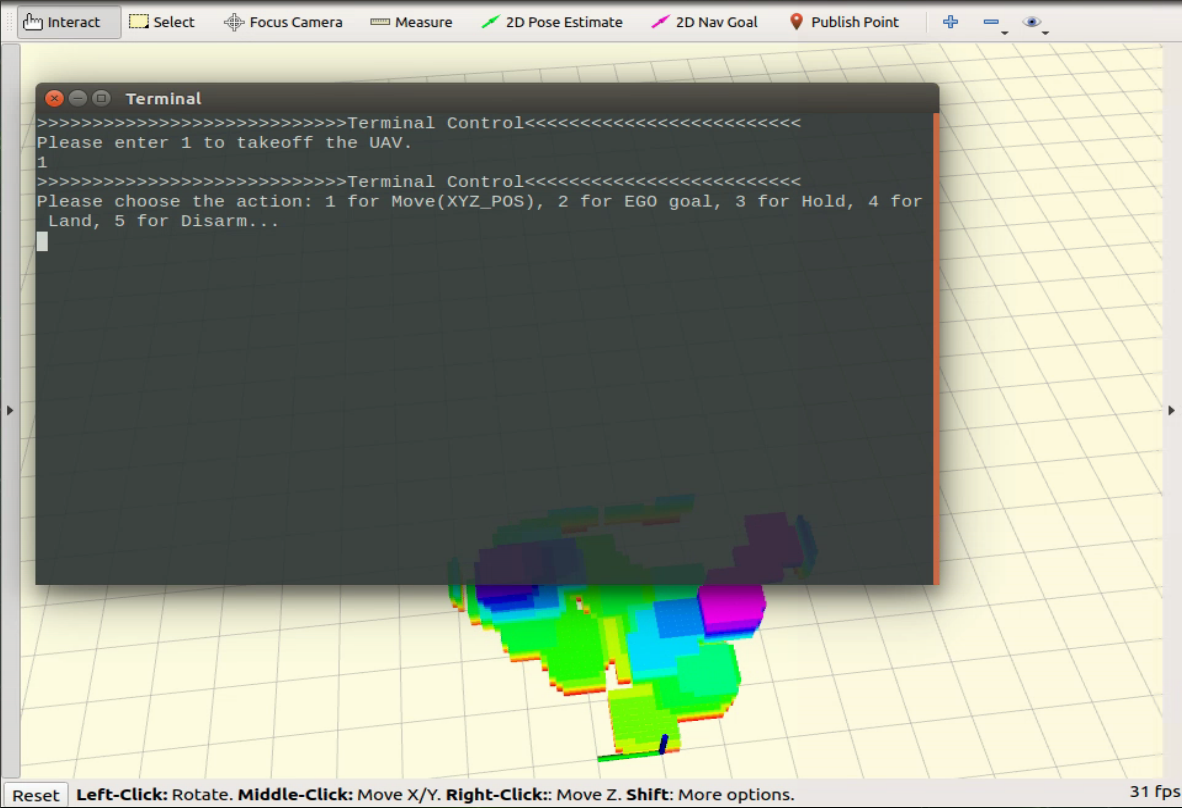
之后会出现终端控制界面,提示有两种控制的输入方式,第一种是通过命令输入控制方式,另外一种是通过键盘按键控制方式。
两种方式都可以控制无人机,一般在做实机实验过程中选择第一种通过命令输入控制方式;第二种键盘控制不太安全。接下来会详细讲解如何使用第一种命令输入控制方式实现指点飞行。
命令行控制终端详解
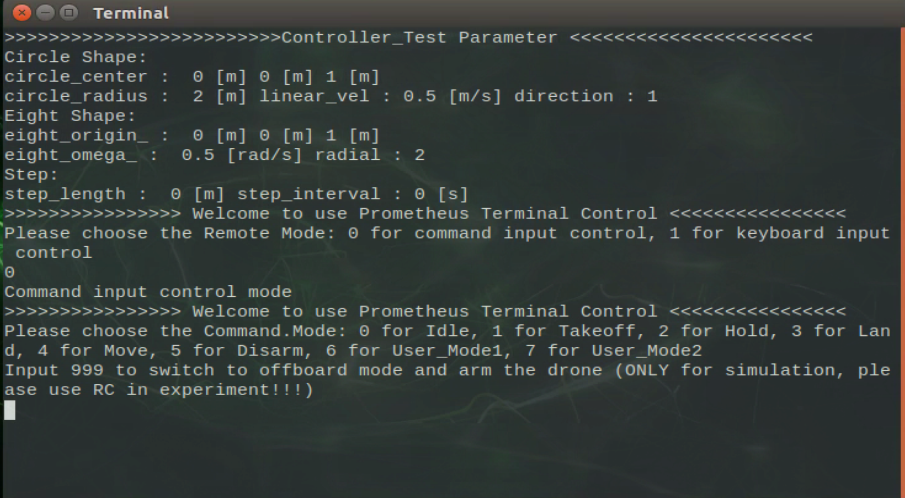
其中 0 表示的是 怠速;意思就是飞机会进入offboard模式,但是在该模式下,没有对飞机进行任何指令的发送。飞机也不会有任何动作。这个指令一般也可以不用。
1 表示的是 起飞;起飞点为当前点,起飞高度通过 yaml参数文档设置,单位是米,默认起飞高度是0.5m
2 表示的是 悬停;飞机正在飞行过程中如何接受到 2 指令,会在当前时刻进入悬停状态。
3 表示的是 降落;降落速度通过 yaml参数文档设置,单位是m/s ,默认降落速度为0.2m/s 。还有一个上锁高度,到达上锁高度之后飞机会进入飞控的本身降落模式进而缓缓着地, 上锁高度通过 yaml 参数文档进行设置,单位是米,默认是 0.18m,即认为离地不到20cm的时候进入飞控本身的降落飞行模式。
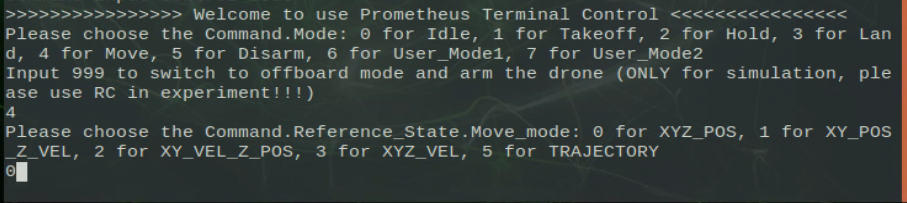
4 表示的是 move模式;该模式就包含我们所称的指点飞行功能,在此模式下,又有5种子模式: 0对应XYZ_POS,空间位置控制; 1对应XY_POS_Z_VEL,水平面位置控制,高度速度控制; 2对应XY_VEL_Z_POS,水平面速度控制,高度定高控制; 3对应XYZ_VEL,空间速度控制; 5对应TRAJECTORY,轨迹跟踪控制。
常用的模式为0空间位置控制(指点飞行),接下来会讲讲实机过程中起飞的具体实现。
起飞
通过控制终端发送1起飞指令,这时候飞机通过板载计算机已经给飞机一直发送起飞指令,但是目前飞机还没有进入offboard模式和解锁,所以飞机是没有响应的。
发送完起飞指令之后,遥控器切换到position模式,然后遥控器操作“内八”进行解锁,最后拨动offboard飞行模式开关。飞机就会慢慢起飞起来,保持在0.5m的高度。
可以看到飞机起飞已经完成,保持在0.5m高度,接下来进行指点操作,这时候就不需要遥控器操作了,只需要看好遥控器,防止意外事情发生;进入指点飞行过程。
指点飞
选择 4 move飞行模式,然后选择 0 空间位置控制,然后选择 0 ENU_FRAME惯性坐标系,最后输入期望的状态,空间位置xyz和航向角yaw。
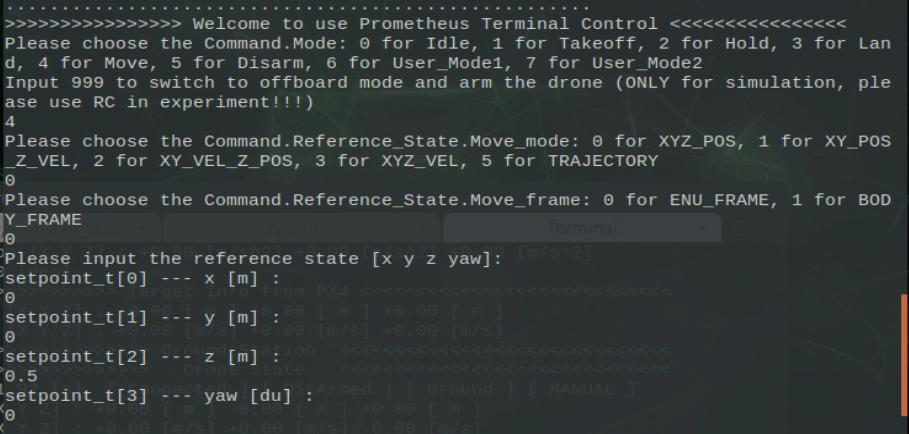
这里我们发送的指令是x为0,y为0,z为0.5,yaw为0。让飞机往前x轴飞行0m,往左y轴飞行0m,往上z轴飞行到0.5m,航向角保持不变发送为0.
飞机开始移动到我们设定空间位置
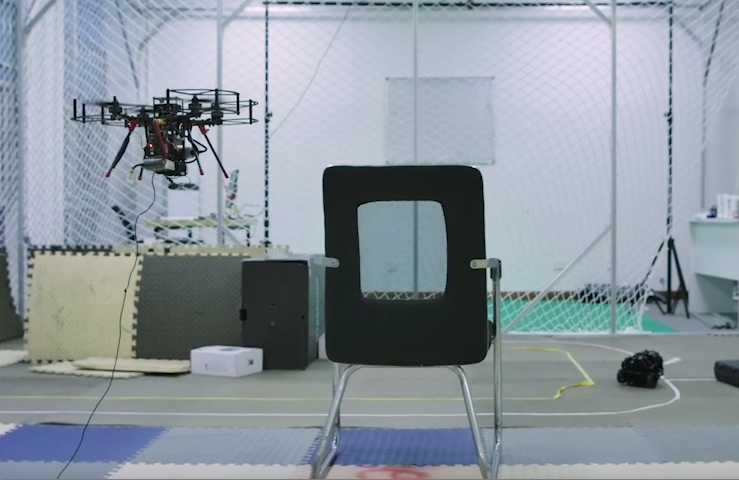
上图可看飞机已经到达并且稳定到我们设定的空间位置。
视频演示
拍摄一段测试视频,预祝复现室内指点飞行成功。
3.中级功能
EGO-planner
本节主要讲解P230系列无人机的EgoPlanner飞行演示。视频紧接上节内容 首次飞行 ,默认已经通过UDP协议连接到QGC地面站和nomachine远程连接到板载计算机, 主要分为一下几点进行讲解:传感器检查,操作,降落,以及最后的视频演示。
注意
受限于开源飞控硬件性能,飞机在长时间不用后会出现位姿漂移,要求每次飞行前电池重新上电以重启飞控和板载计算机,并严格按照wiki规范操作,避免炸机风险。
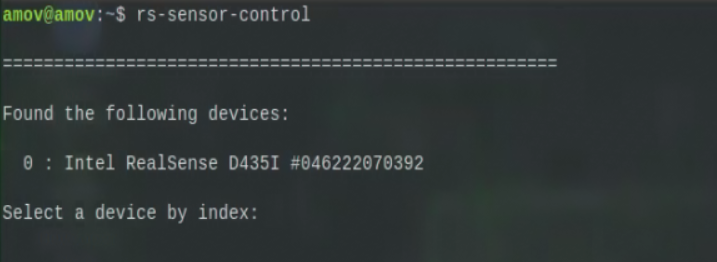
传感器检查
首先在终端输入下面命令,查看是否D435i已经被系统识别到
rs-sensor-control
操作
在终端输入下面命令启动
/home/amov/amovlab_ws/src/ego_sh/ego.sh

等到程序完全启动后,依次查看每个终端是否有报错
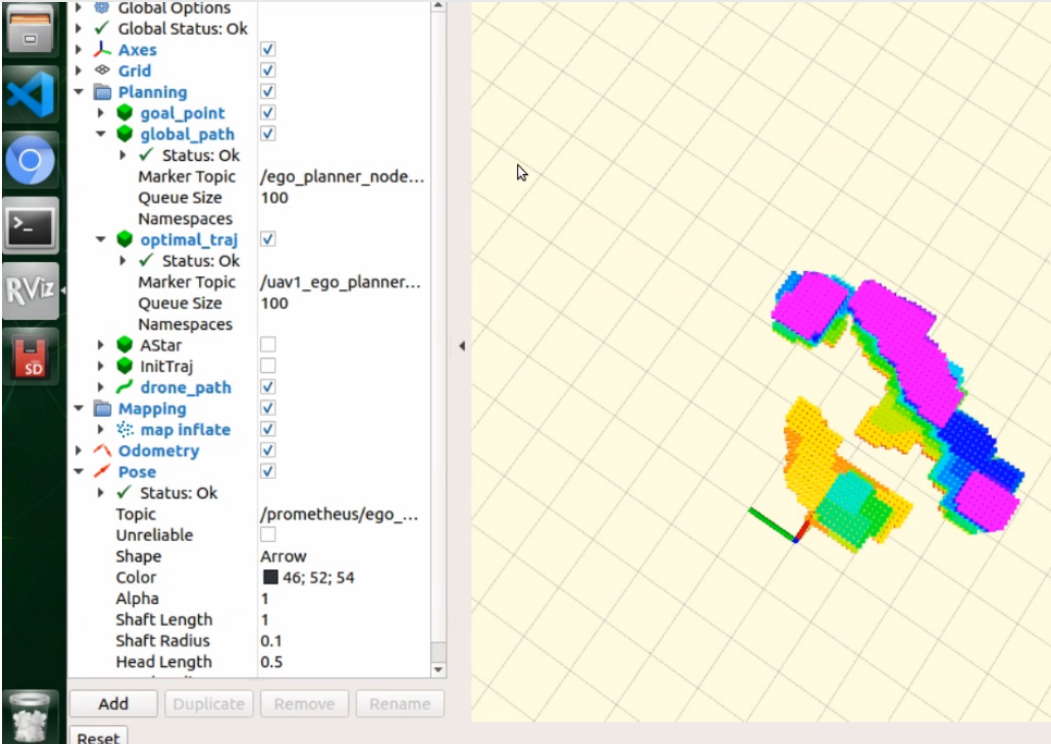
会自动弹出rviz界面,并可以看到建图效果,里面可以看到障碍物
确认参数和设置没有问题后,在此终端输入1并敲回车,然后遥控器先切到定点模式,在此终端继续输入1并敲回车,解锁无人机
解锁完之后,我们切offboard模式,飞机会起飞到一个稳定高度。
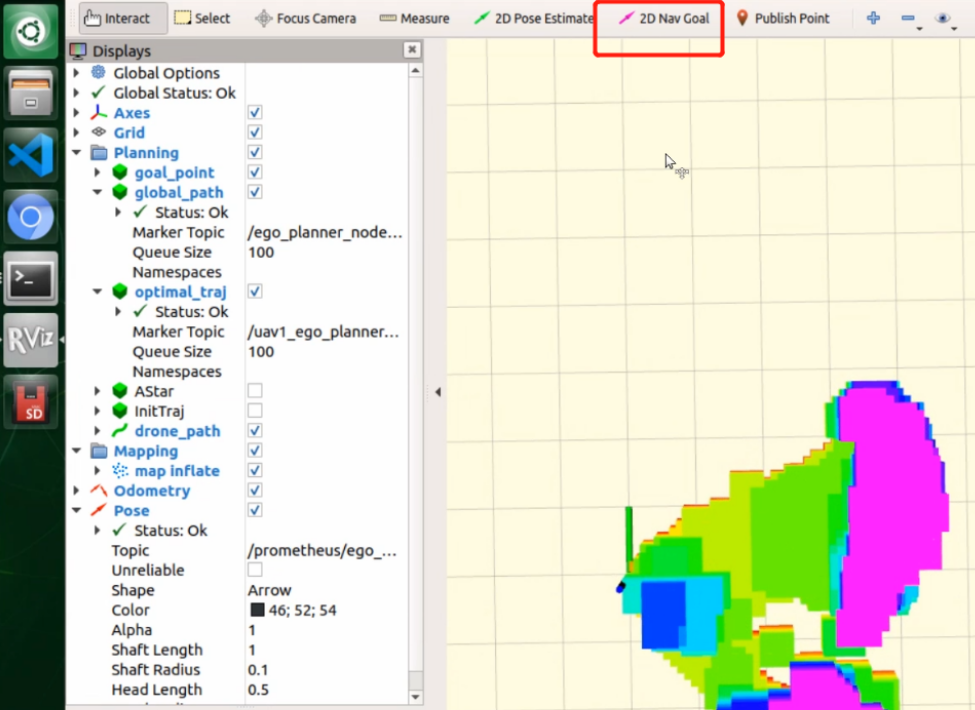
等到无人机起飞到一个稳定高度,也即是我们设定的起飞高度后,回到rviz界面,点击选择2D Nav Goal
在rviz上点击一个点作为目标点,会自动生成一个绕开障碍物的路径
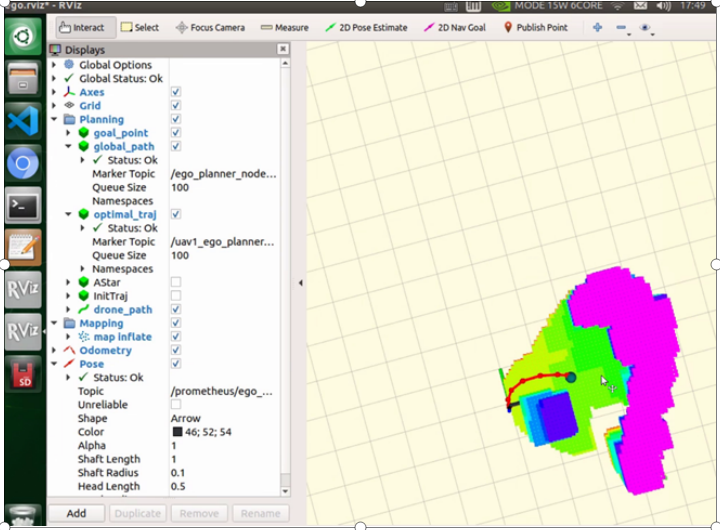
此时无人机会沿着这个生成的路径飞,绕开障碍物,完成壁障飞行功能。
降落
无人机飞到目标点后,可以遥控器拨动offboard飞行模式开关切出offboard模式,并缓慢手动降落。
视频演示
拍摄两段测试视频,预祝复现室内ego避障飞行成功。
4.高级功能
VINS_FUSION
本节主要讲解P230系列无人机的VINS_FUSION。视频紧接上节内容 首次飞行 ,默认已经通过UDP协议连接到QGC地面站和nomachine远程连接到板载计算机, 主要分为一下几点进行讲解:传感器检查,操作,降落,以及最后的视频演示。
注意
在开始这个使用功能之前,需要仔细阅读本wiki,避免炸机。
不同于携带T265鱼眼相机的视觉定位,我们考虑仅使用一种传感器来实现定位+避障的功能,定位方面我们使用了港科大开源的slam算法 VINS_FUSION。 为极大地方便用户进行二次开发,我们打通了VINS和Prometheus之间的通信链路,用户仅需要在我们平台上进行算法的研究即可,而不需要考虑安装烦人的环境。 考虑到个人的环境差异,我们仅部署了VINS_FUSION,具体的参数以及算法优化还需要自己修改。
环境部署
SLAM组成中,前端中的特征点提取以及匹配是最消耗CPU的过程,因此我们引入了GPU版本的VINS实现对OpenCV提取和匹配特征点的加速,极大的降低延时性。 所以我们需要安装CUDA,这个过程可以自行百度解决,也可以直接购买我们的平台。这里默认你已经做好环境准备。
代码组成
在开始启动指令之前,我们需要先了解一下VINS的代码组成以及配置文件
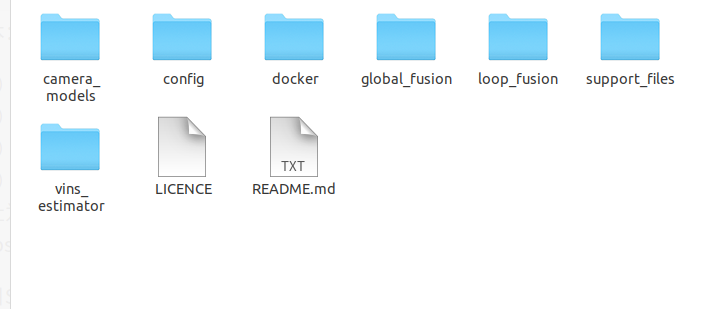
config文件夹存放我们需要的配置文件,docker文件夹存放的是docker镜像,global_fusion文件夹存放的是全局位姿融合,loop_fusion是局部位姿融合,vins_setimator文件夹存放的是 位姿估计,视觉惯性对齐,IMU预积分及初始化等。
标定环境
如果您已经购买我们的标定环境,就可以跳过以下安装步骤,只看标定环节。
我们需要使用Kalibr来标定IMU和相机的之间变换矩阵,这对VINS极为重要,变换精度如果小于1-2°,整体的精度就会大打折扣。 标定的具体流程我们会单独放在wiki上,这里就不占用过多篇幅。如果用户想省去安装的麻烦,也可以直接购买我们的标定环境。 这里默认你已经做好标定。
安装kalibr
1.依赖安装
sudo apt install python-setuptools
sudo apt install python-setuptools python-rosinstall ipython libeigen3-dev libboost-all-dev doxyen
sudo apt install ros-melodic-vision-opencv ros-melodic-image-transport-plugins ros-melodic-cmake-modules python-software-properties software-properties software-properties-common libpoco-dev python-matplotlib python-scipy python-git python-pip ipython libtbb-dev libblas-dev liblapack-dev python-catkin_tools libv4l-dev
2.下载源码
mkdir -p kalibr_ws/src
git clone https://github.com/ethz-asl/Kalibr.git
cd ~/kalibr_ws
catkin build -DCMAKE_BUILD_TYPE=Release -j4
安装IMU_Utils
首先是一些依赖的安装
1.ceres的安装
1.1下面安装ceres的依赖
sudo apt-get install liblapack-dev libsuitesparse-dev libcxsparse3.1.2 libgflags-dev
sudo apt-get install libgoogle-glog-dev libgtest-dev
1.2下载编译ceres-solver
git clone https://github.com/ceres-solver/ceres-solver.git
cd ceres-solver
mkdir build
cd build
cmake ..
make && sudo make install
2.安装code_utils
mkdir -p ~/kalibr_workspace/src
cd ~/kalibr_workspace
catkin_make
sudo apt-get install libdw-dev
cd kalibr_workspace/src
git clone https://github.com/gaowenliang/code_utils.git
cd ..
catkin_make
3.安装IMU_Utils
cd kalibr_workspace/src
git clone https://github.com/gaowenliang/imu_utils.git
cd ..
catkin_make
到此为止如果没有问题,就代表IMU_utils已经安装好了
标定流程
imu的标定
1录制imu的数据集
这里的话题名字需要自己根据自己的修改,建议录制两小时。
rosbag record /mavros/imu/data -O imu_D435i.bag
2.标定启动文件 imu.launch
- <launch>
- <node pkg=”imu_utils” type=”imu_an” name=”imu_an” output=”screen”>
<param name=”imu_topic” type=”string” value= “/marvos/imu/data”/> <param name=”imu_name” type=”string” value= “imu_px4”/> <param name=”data_save_path” type=”string” value= “$(find imu_utils)/data/”/> <param name=”max_time_min” type=”int” value= “120”/> <param name=”max_cluster” type=”int” value= “100”/>
</node>
</launch>
3.随后启动imu_utils 标定IMU
roslaunch imu_utils imu.launch
rosbag play -r 200 imu_D435I.bag
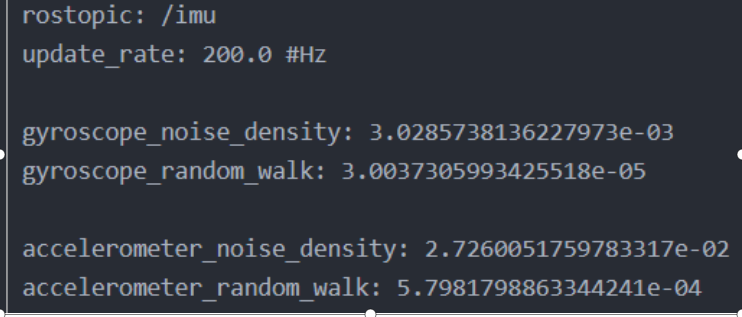
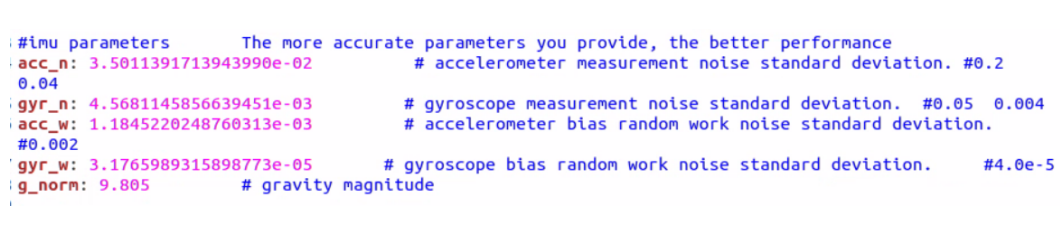
会在IMU的data文件夹下得到一个imu_px4的标定文件,我们只需要使用里面的一些参数。
4.新建一个imu.yaml文件,内容如下
相机标定
1.改变相机发布频率
话题名需要根据自己的话题名更改,降低发布频率主要是为了减小录制包的大小
rosrun topic_tools throttle messages /camera/infra1/image_raw 4.0
rosrun topic_tools throttle messages /camera/infra2/image_raw 4.0
2.录制bag包
rosbag record /cmaera/infra1/image_raw /camera/infra2/image_raw -O camera.bag
3.标定
我这里使用的标定板是官方提供的标定板,并不是常见的棋盘格。大小也需要根据自己的实际大小修改,不可直接粘贴复制!
kalibr_calibrate_cameras –target april_6x6_24x24mm.yaml –bag camera.bag –bag-from-to 5 30 –models pinhole-radtan pinhole-radtan –topics /camera/infra1/image_raw /camera/infra2/image_raw
之后会得到一个标定好的yaml文件,我的是camchain.yaml,具体看你自己。这个yaml文件是为我们联合标定做准备的。
校准相机和imu
把IMU和相机固定在一起录制bag 包,录制的时候需要充分激励IMU的各个轴,绕3个轴旋转和3个方向的平移。这里附上官方标定动作,需要挂梯子。
https://www.youtube.com/watch?app=desktop&v=puNXsnrYWTY
这里需要修改imu的发布频率,官方推荐为200HZ
rosrun topic_tools throttle messages /camera/imu 200.0 /imu
1.录制相机和IMU的bag包
rosbag record /camera/infra1/image_rect_raw /camera/infra2/image_rect_raw /imu -o camera_imu.bag
2.执行标定
kalibr_calibrate_imu_camera –target april_6x6_24x24mm.yaml –bag camera_imu.bag –cam camchain.yaml –imu imu.yaml
得到了几个配置文件
参数配置
我们需要将标定出来的参数配置到VINS中,主要是IMU和双目相机之间的变换矩阵,标定出来的结果对系统有着极为重要的影响,精度越高,系统的误差就越小。
我们需要更改的参数如下,当然我们已经都修改好,根据自己的实际情况适当修改。
首先需要更改自己实际订阅的IMU以及双目图像发布话题以及输出路径
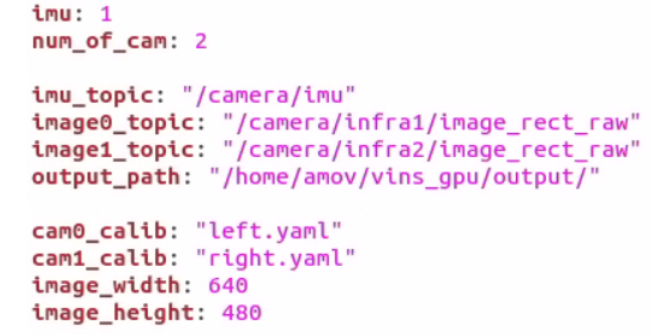
下面的矩阵涉及IMU和相机的相对变换,可以由之前的联合标定得到
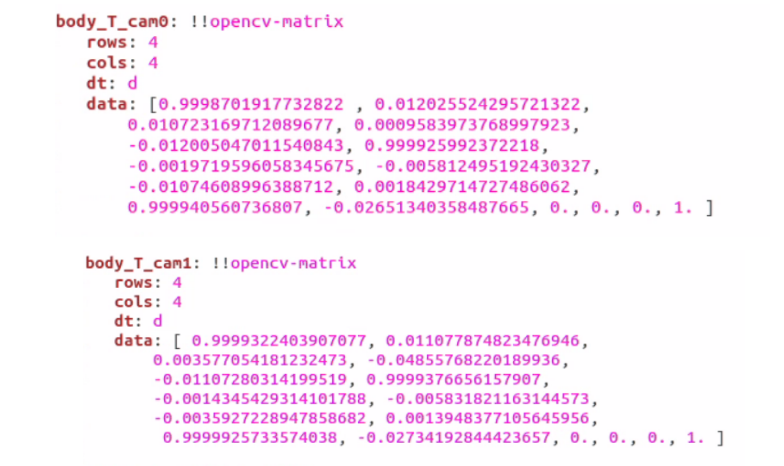
IMU的数据也是由之前的标定得到
下面参数的意思是在线估计IMU的相机之间的时间差,虽然 Intel说D435i已经做好硬件同步,但是Kalibr标定出来还是会有0.06的时间偏差

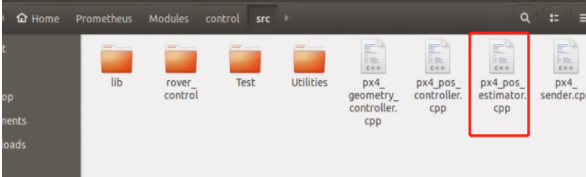
接入Prometheus
我们需要在下面这个文件中修改内容。
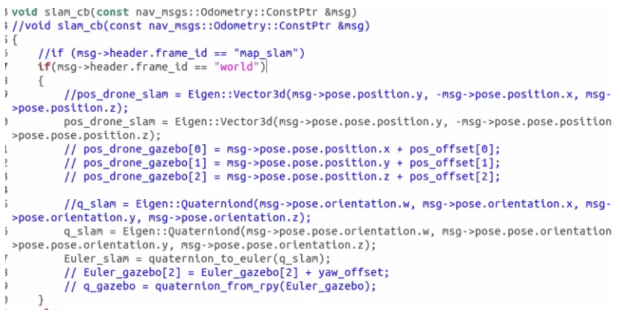

以及在vio_onboard.launch文件中修改定位数据来源

到此为止,我们已经做好了所有的部署功能,下面就可以启动VINS了。
启动指令
先启动D435i相机节点,作为获取数据来源。
“rolaunch realsense2_camera rs_camera.launch”
在启动VINS节点,处理D435i获取到的数据,并发布出来。
“rosrun vins vins_node /home/amov/vins_gpu/src/VINS-Fusion-gpu/config/realsense/realsense2.yaml”
最后启动Prometheus节点,订阅VINS发布出来的数据,并发送给PX4以及地面站。
“roslaunch p230_expriments p230_vio_onboard.launch”
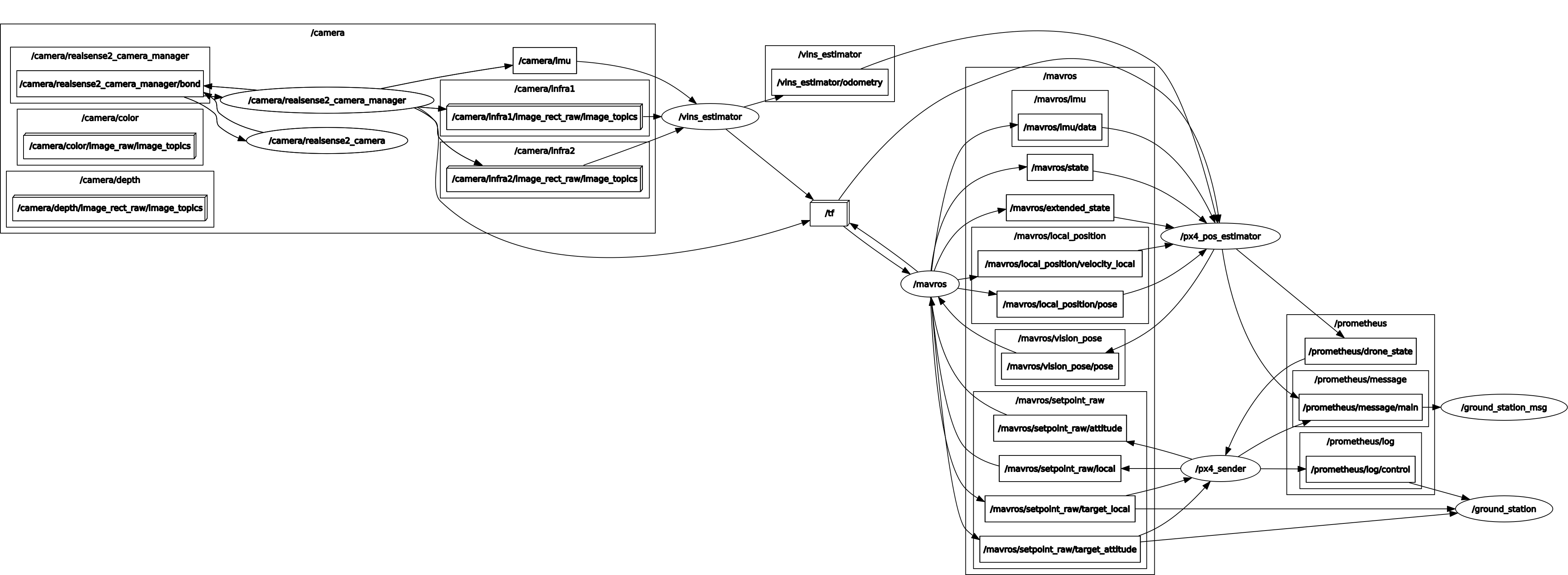
节点图已经正确发布出来
我们可以看到终端已经把VINS发布出来的数据正确打印出来,并且地面站上的航向角也是正确的
接下来我们我们可以先拿着飞机手动走一圈,看看数据精度是否能够满足飞行要求。
如果数据没有问题我们就可以进行定点飞行。
定点飞行
待补充
最后,我们进行vins+px4+ego-planner实验
vins+px4+ego-planner实验
待补充