5-进阶功能-航点避障飞行
本节主要讲解P600系列无人机在室外的航点避障飞行演示。视频紧接上节内容 首次飞行 ,默认已经通过home图数传连接到QGC地面站和nomachine远程连接到板载计算机, 主要分为以下几点进行讲解:启动指令,起飞,避障飞行,以及最后的视频演示。
启动指令
首先启动
roslaunch p600_experiment astar_onboard_gps.launch

再启动第二个指令
roslaunch p600_experiment astar_ground_gps.launch
起飞
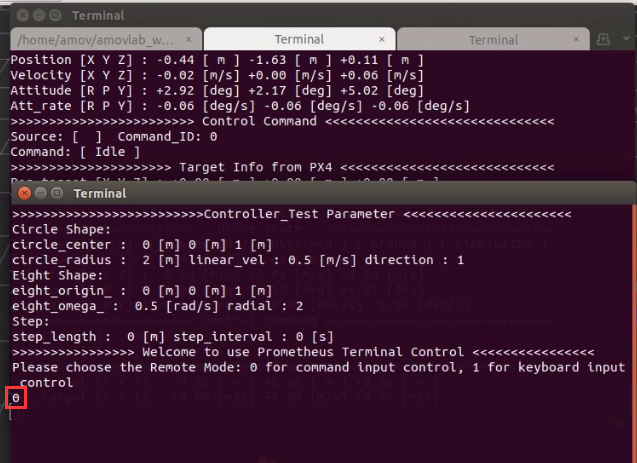
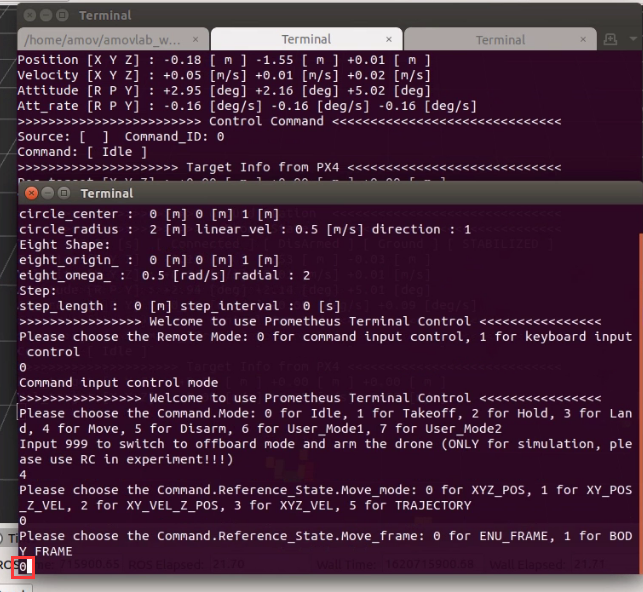
接着在此终端依次输入指令让无人机起飞到1.4米高度。
先输入0
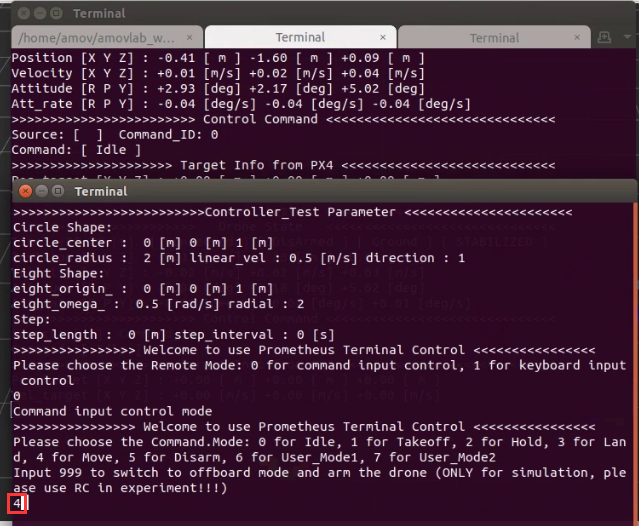
再输入4
再输入0
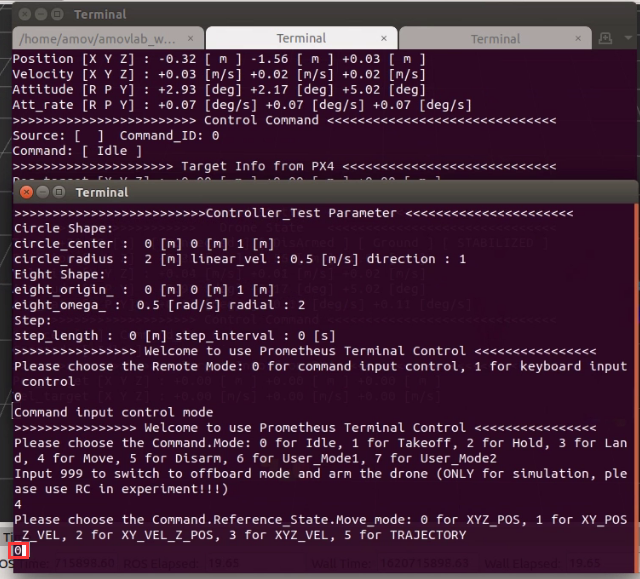
再输入0
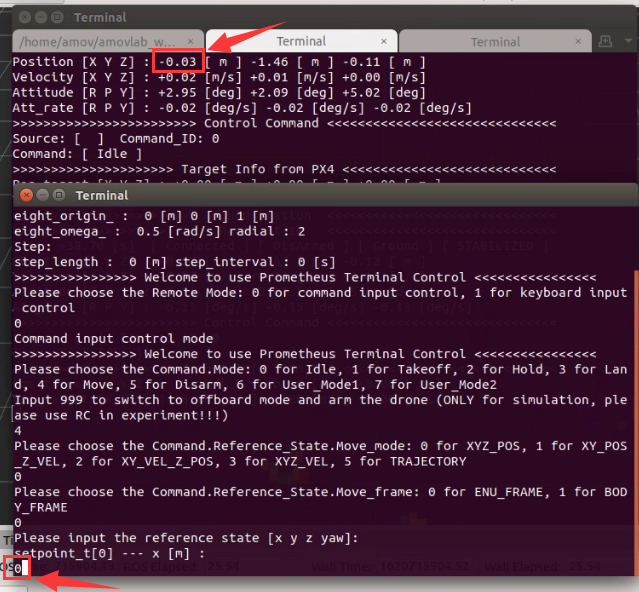
再依据当前飞机的本地位置数据的x输入对应期望x
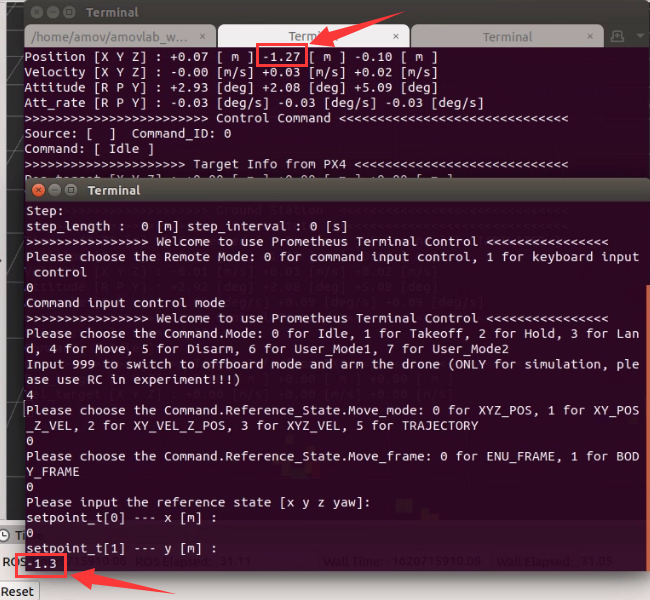
再对应输入y的位置
再输入高度z为1.4,这个不需要根据当前无人机本地位置来写
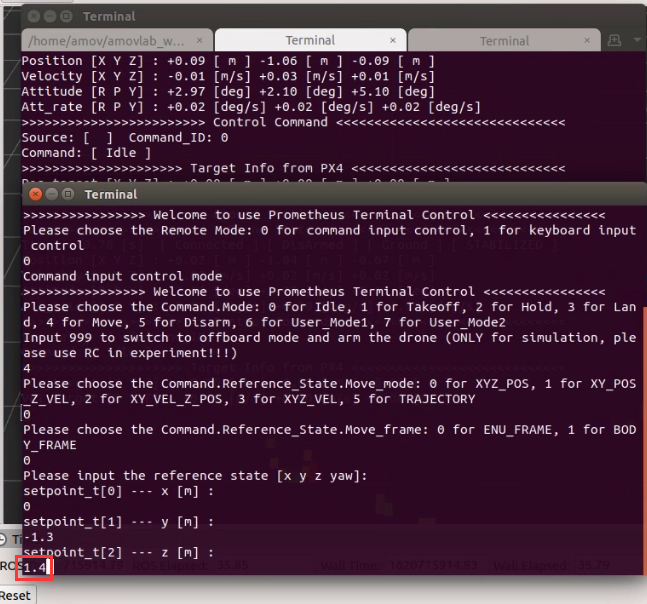
期望偏航为0
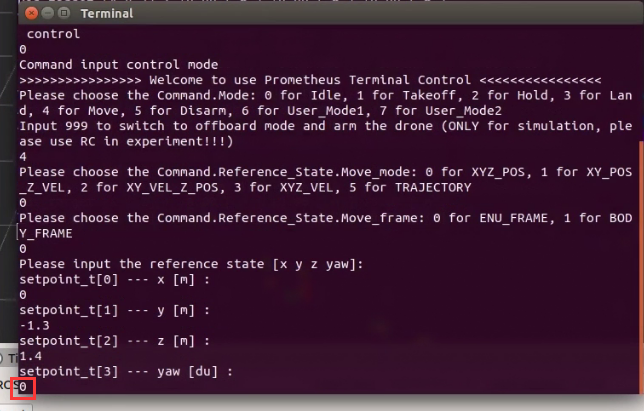
然后遥控器切定点解锁切offboard,无人机会自动起飞到1.4米高度。
避障飞行
先点击rviz里的3D Nav Goal
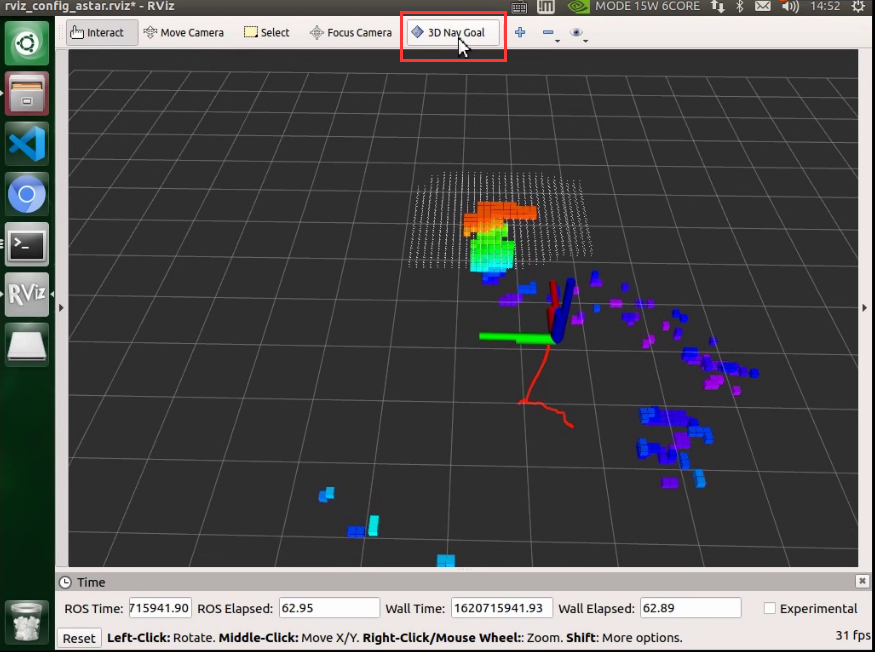
然后在rviz中点一个目标点
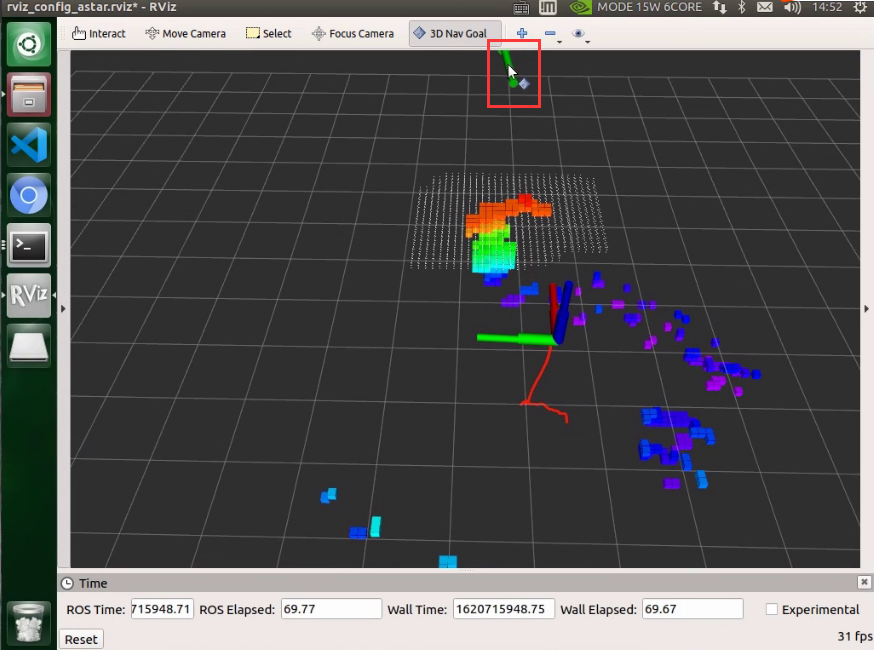
无人机会自动规划出绕开障碍物的路径
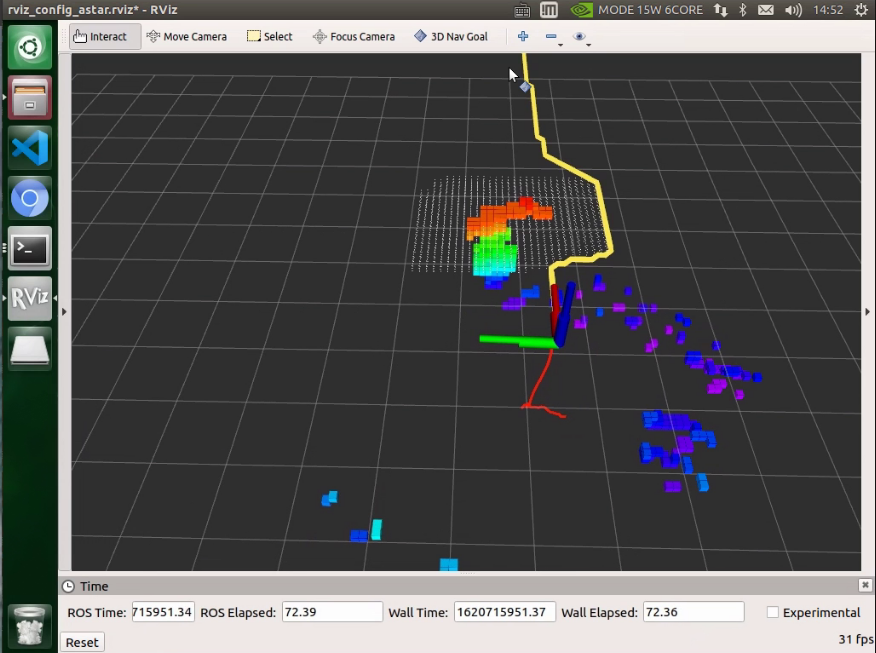
无人机到达目标点后,可以遥控器切出offboard,然后手动操控遥控器降落。
视频演示
常见问题
无法建图, 建图异常
ls /dev``查看是否多个 ``ttyUSB, 如果有多个请将其他的拔掉,然后重新拔插激光雷达的串口线。具体原因见 吊舱无法控制 的常见问题1。