首次飞行(室外)
本节主要讲解GPS配置下无人机室外的首次飞行。
电脑软件准备工作
准备一台笔记本电脑,电脑系统不做要求,可以是Windows7,Windows10或者是Ubuntu系统。需要安装QGroundControl(以下简称QGC)和nomachine。 QGC的作用是连接到飞机,监控飞机本身的状态(传感器是否正常,参数配置是否正常);nomachine用作远程连接到板载计算机。
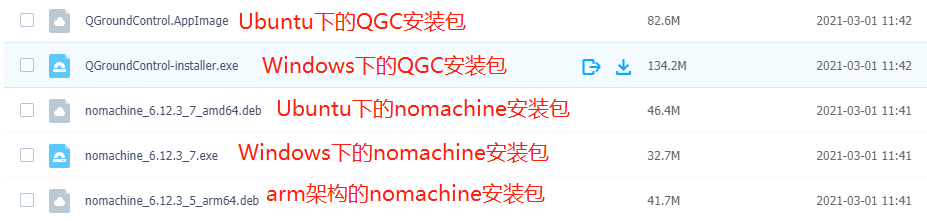
从图中可以看到,有不同操作系统下的安装包,根据自己笔记本电脑系统安装相应的QGC和nomachine。
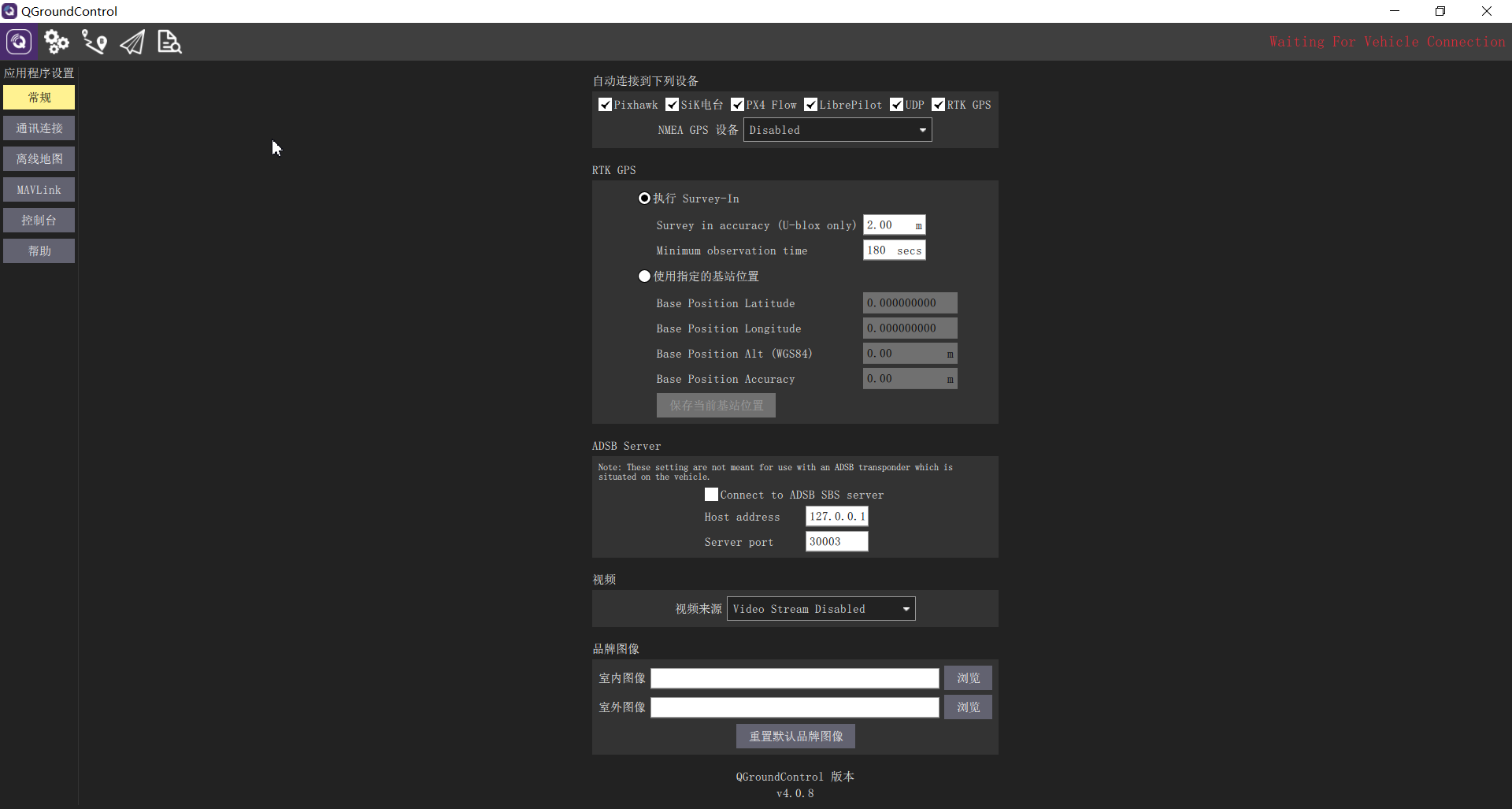
安装QGC地面站
正确安装上面安装包之后,打开QGC地面站:
注意
最下方的版本是V4.0.8
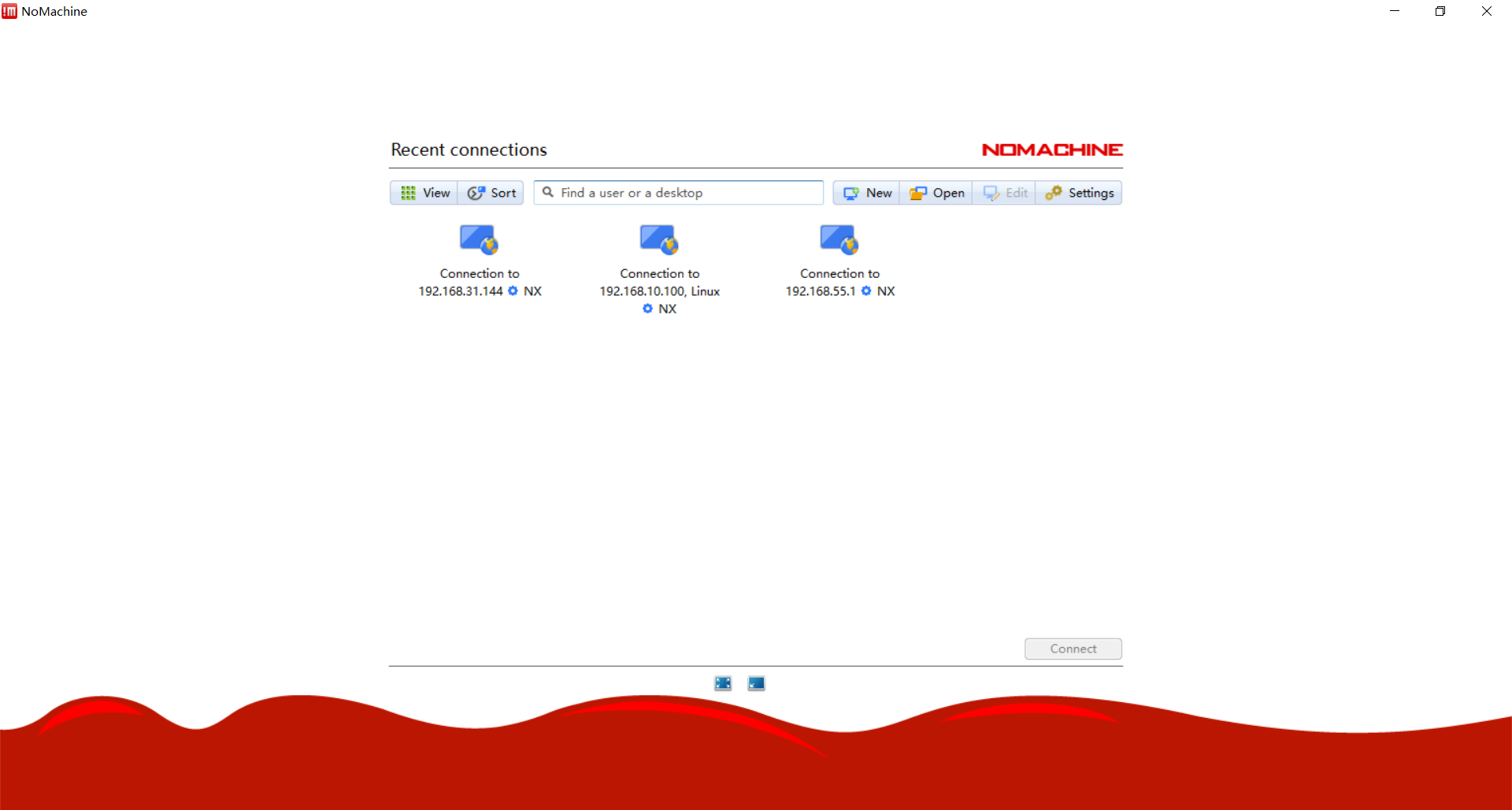
安装nomachine
正常安装按完成之后,打开nomachine:
硬件准备工作
p450无人机+富斯i6s遥控器
5300mah/4000mah航模锂电池


遥控器电池

安全绳

qgc远程连接到飞机
首先连接到飞机的数传wifi,命名为amov-uav#####,“#####”代表出厂序列号。
密码为12345678
电脑连上飞机的数传wifi后,打开QGC地面站,在通讯连接下面选择“添加”

类型选择“ TCP”,主机地址为“192.168.10.###”,“###”为wifi名字的后三位数字。端口号为“6000”。
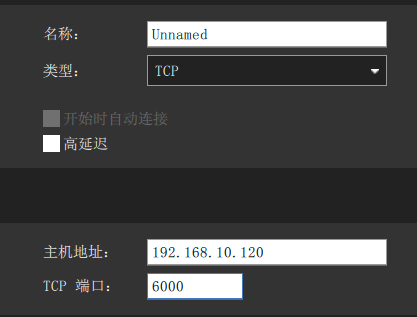
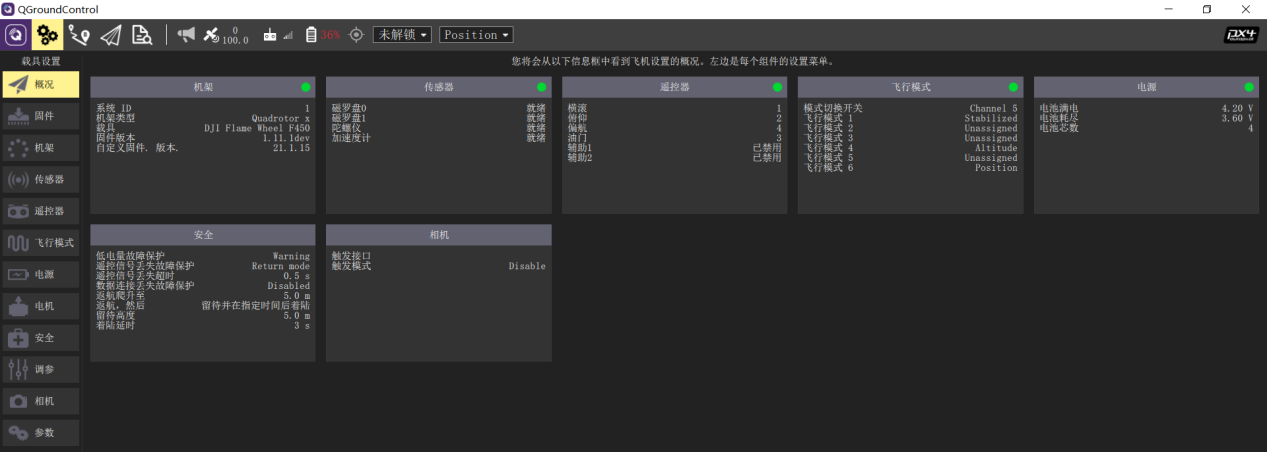
然后点击“连接”,连接成功后如下图所示
注意
如果做无人机室外测试,需要在地面站修改参数EKF2_AID_MASK,EKF2_HGT_MODE,详细操作如下:
首先点击参数(Parameters)按钮,进入参数修改界面,如下。
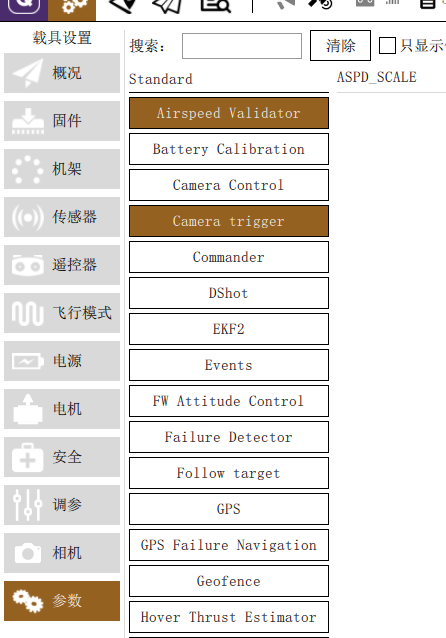
在search栏输入aid,选择EKF2_AID_MASK参数

在窗口右上侧会弹出子页面,如下图所示。
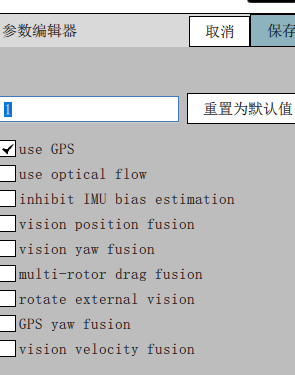
这里我们使用默认选择use GPS作为室外飞行的定位数据来源。
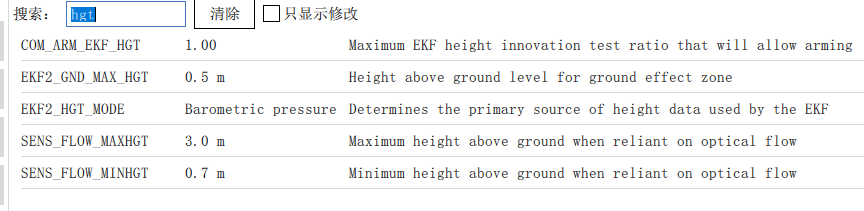
在search栏输入hgt,选择EKF2_HGT_MODE参数栏
在窗口右上弹出的子页面上,点击下拉菜单,选择Barometric pressure,如下图所示
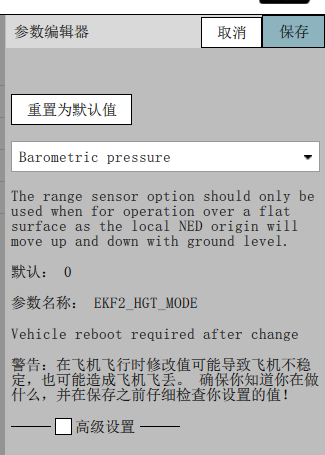
最后保存退出。
设置完参数后,我们需要在QGC中先将飞控重启一下,操作如下,
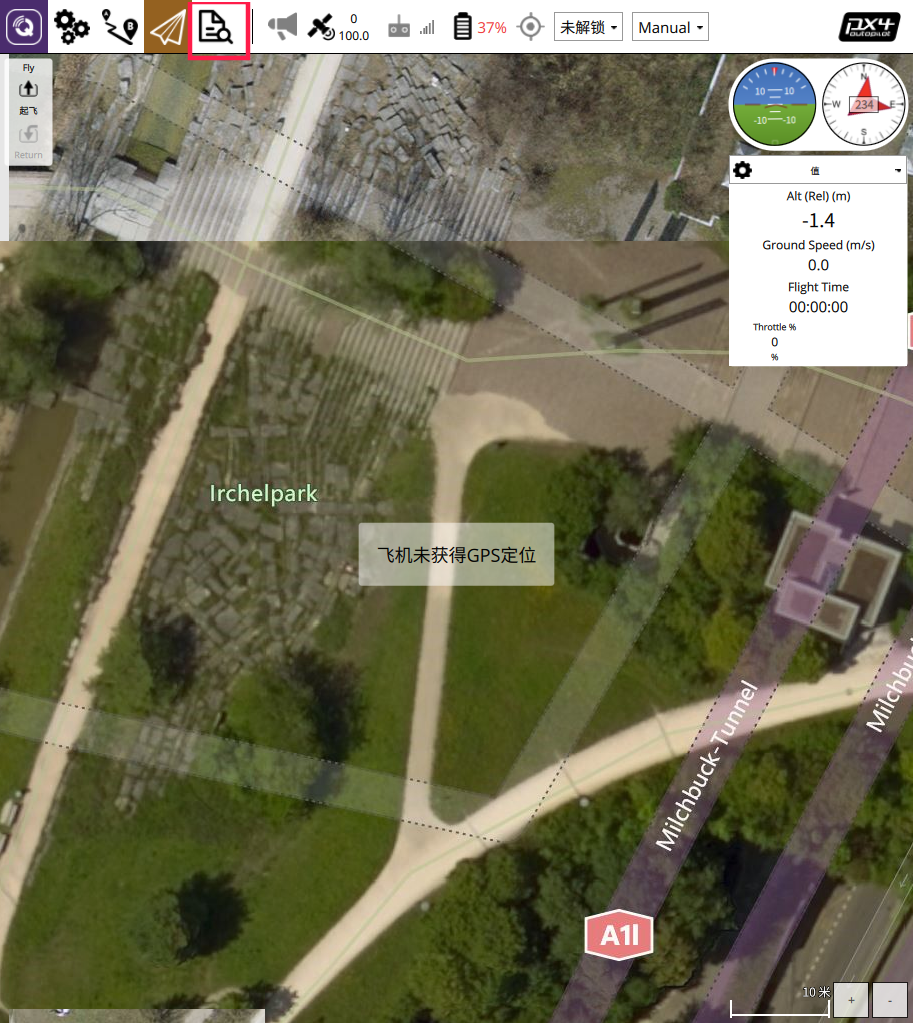
点击红框所圈出的图标,进入如下界面
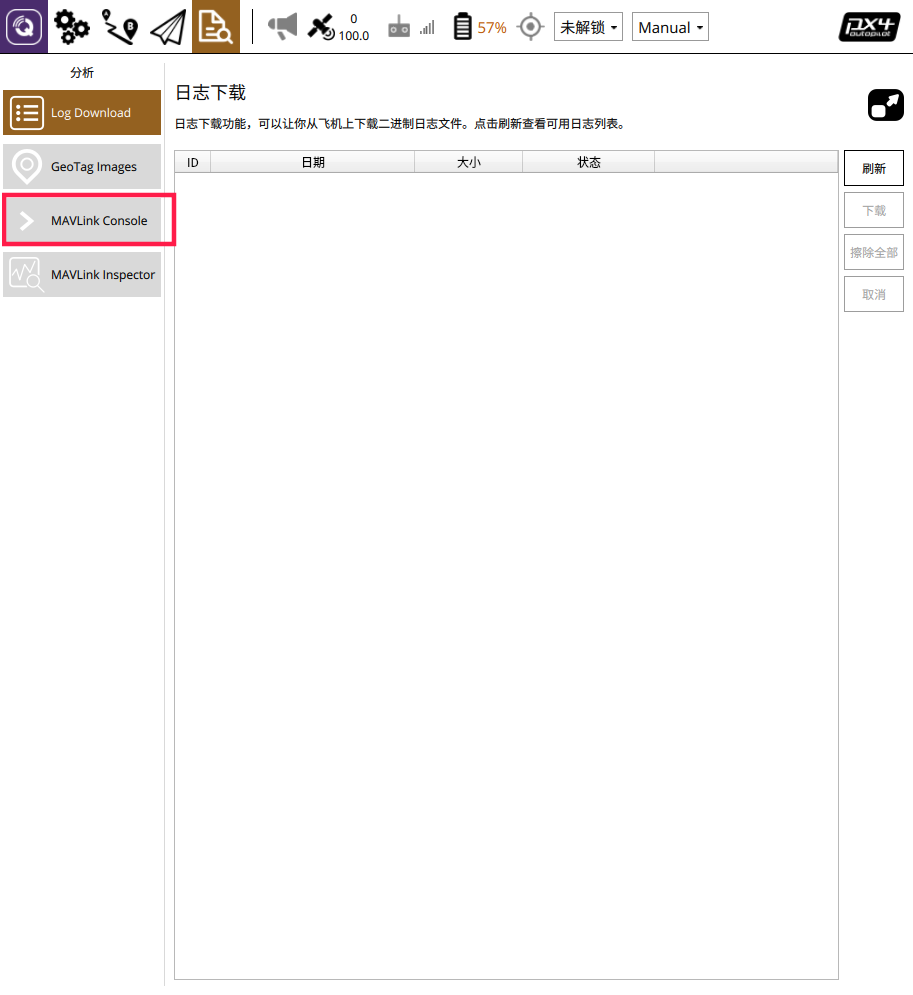
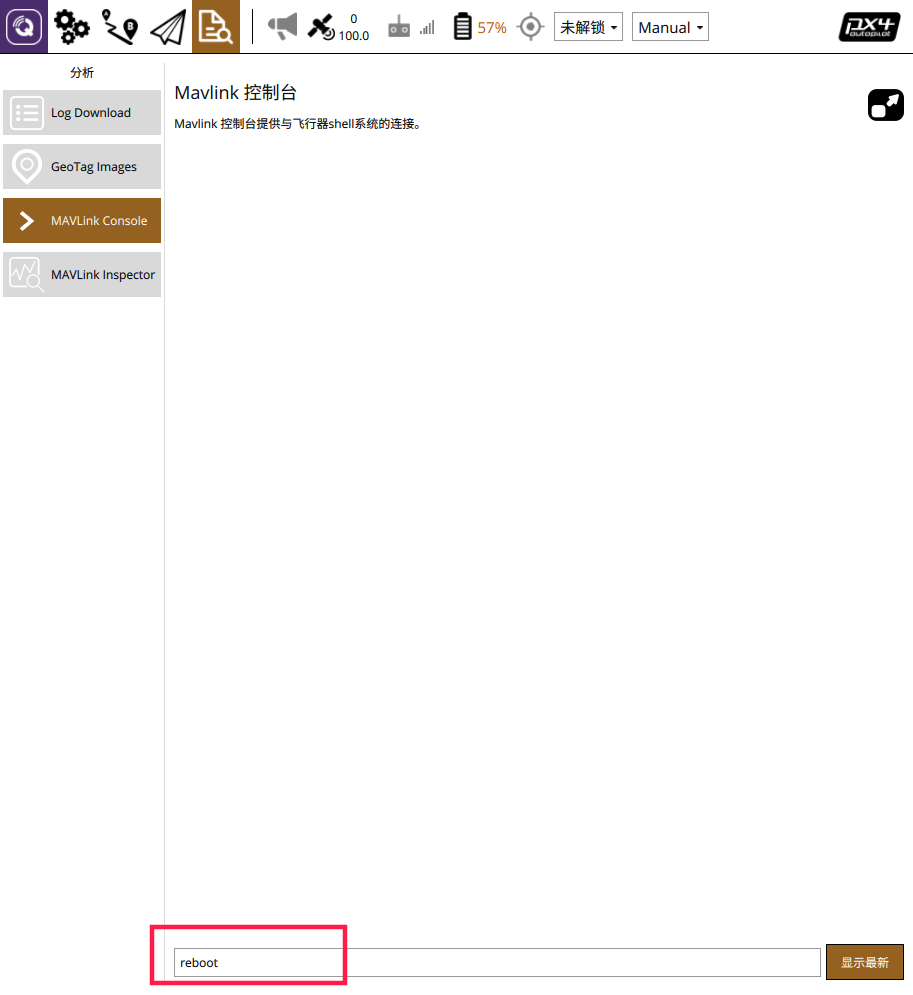
选择MAVLink Console,进入MAVLink控制终端,输入reboot,回车,听到飞控重启的提示音,即重启飞控成功。
等待飞控重启完成后,无人机的航灯绿色常亮且QGC上无人机的卫星数量在13颗及以上时,即可将遥控器切定点进行室外飞行。