快速入门
1.使用前须知
使用者需要仔细阅读本wiki,避免炸机。
注意
受限于开源飞控硬件性能,飞机在长时间不用后会出现位姿漂移,要求每次飞行前电池重新上电以重启飞控和板载计算机,并严格按照wiki规范操作,避免炸机风险。
2.开箱视频
3.电脑设置
准备一台笔记本电脑,电脑系统不做要求,可以是Windows7,Windows10或者是Ubuntu系统。需要安装QGroundControl(以下简称QGC)和nomachine。 QGC的作用是连接到飞机,监控飞机本身的状态(传感器是否正常,参数配置是否正常);nomachine用作远程连接到板载计算机。
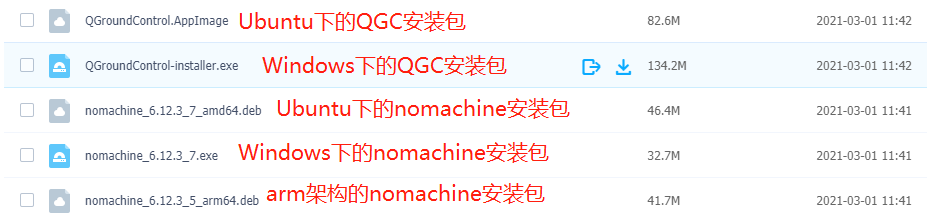
从图中可以看到,有不同操作系统下的安装包,根据自己笔记本电脑系统安装相应的QGC和nomachine。
安装QGC地面站
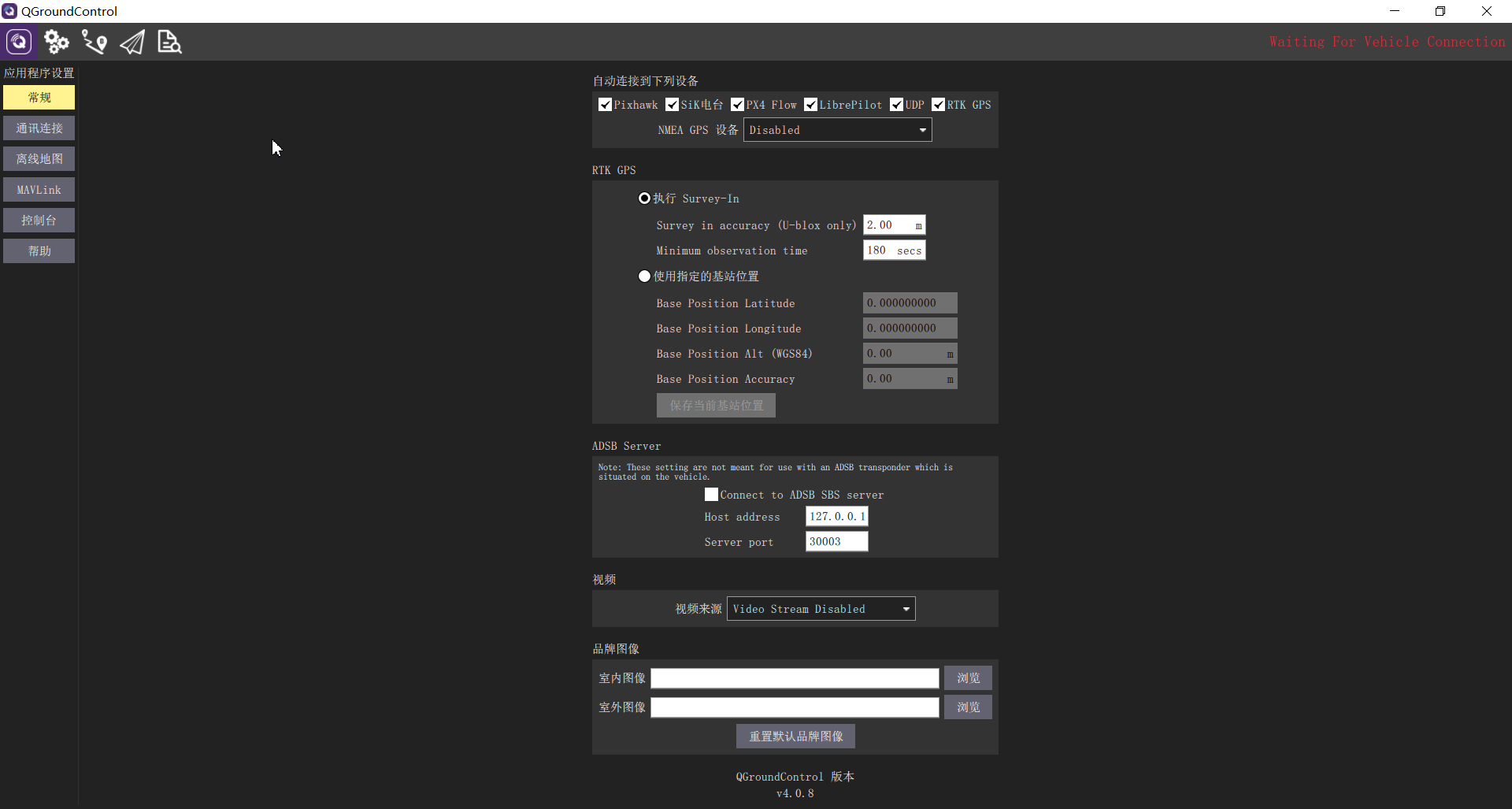
正确安装上面安装包之后,打开QGC地面站:
注意
最下方的版本是V4.0.8
安装nomachine
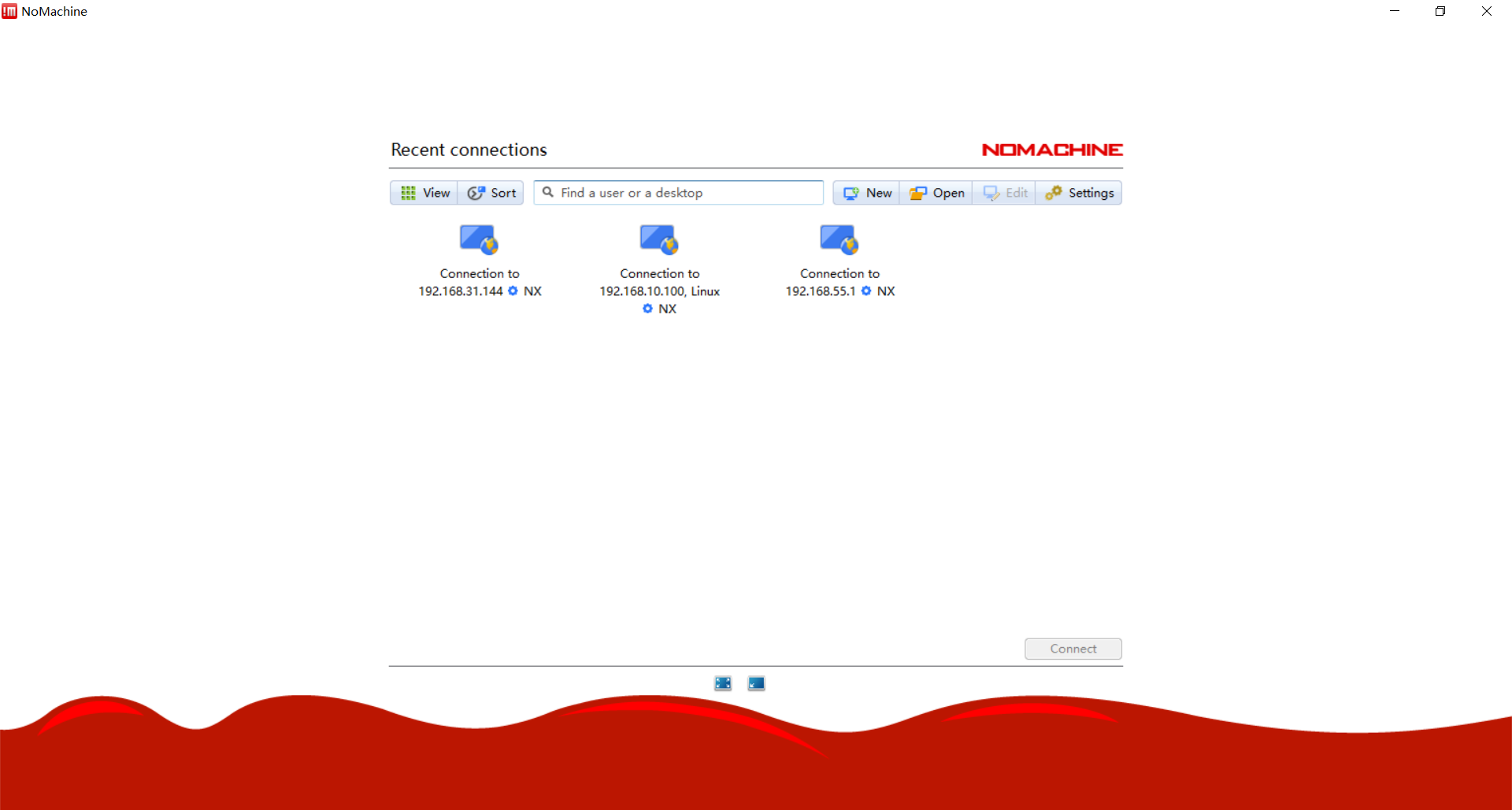
正常安装按完成之后,打开nomachine:
装完软件后,我们就可以先给无人机上电了。上电之前我们需要先做些准备工作。
4.使用前的检查和注意事项
使用前需要准备以下硬件
p230无人机+富斯i6s遥控器

4000mah航模锂电池

遥控器电池

安全绳

5.组装及链接
无人机电源上电如下图所示

需要检查下各个接口有没有因为运输造成的接口松动。 电机和遥控器接收机与飞控的连接。
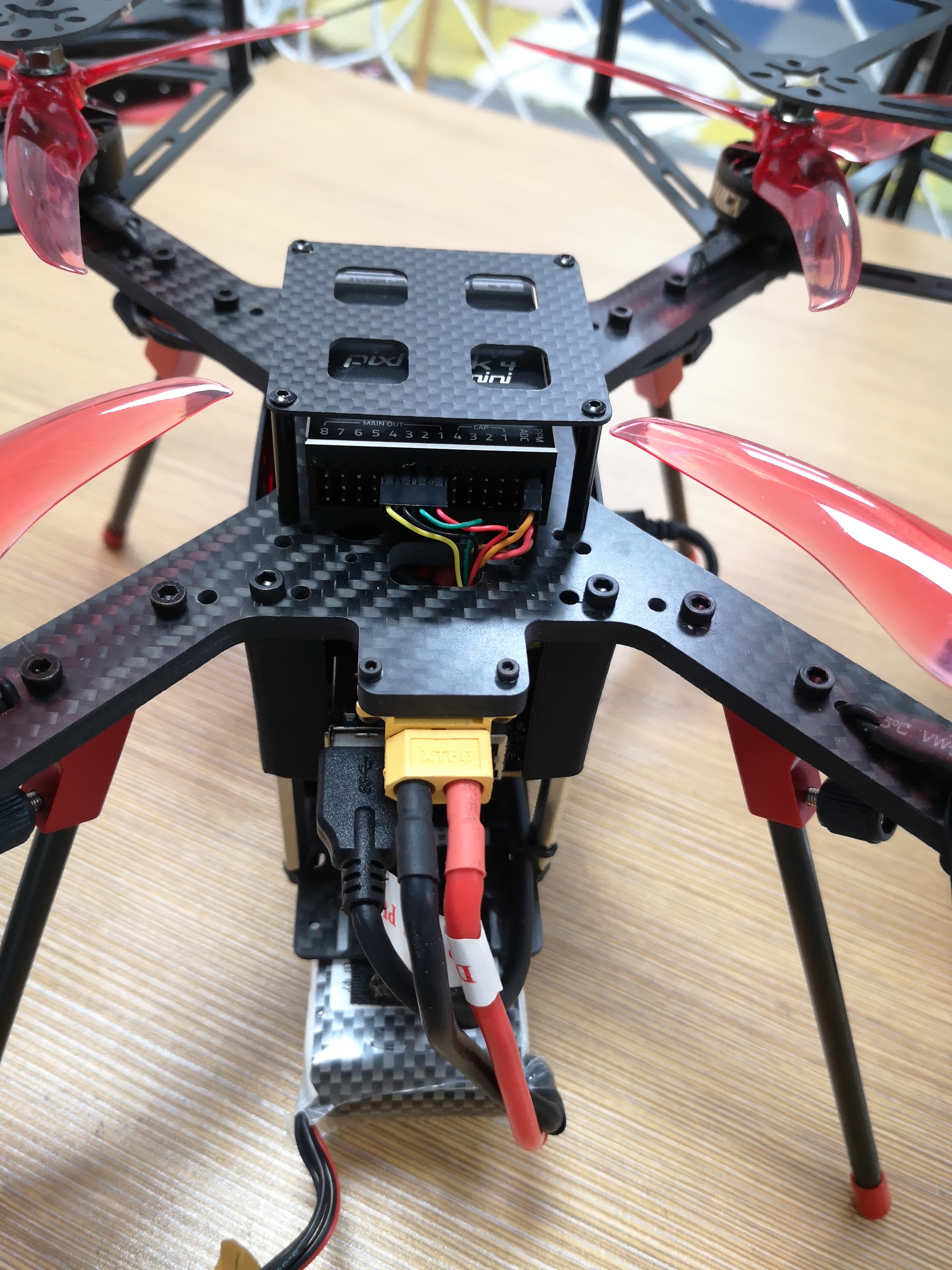
飞控与板载电脑的连接。

需要检查下各个接口有没有因为运输造成的接口松动。
查看板载计算机ip
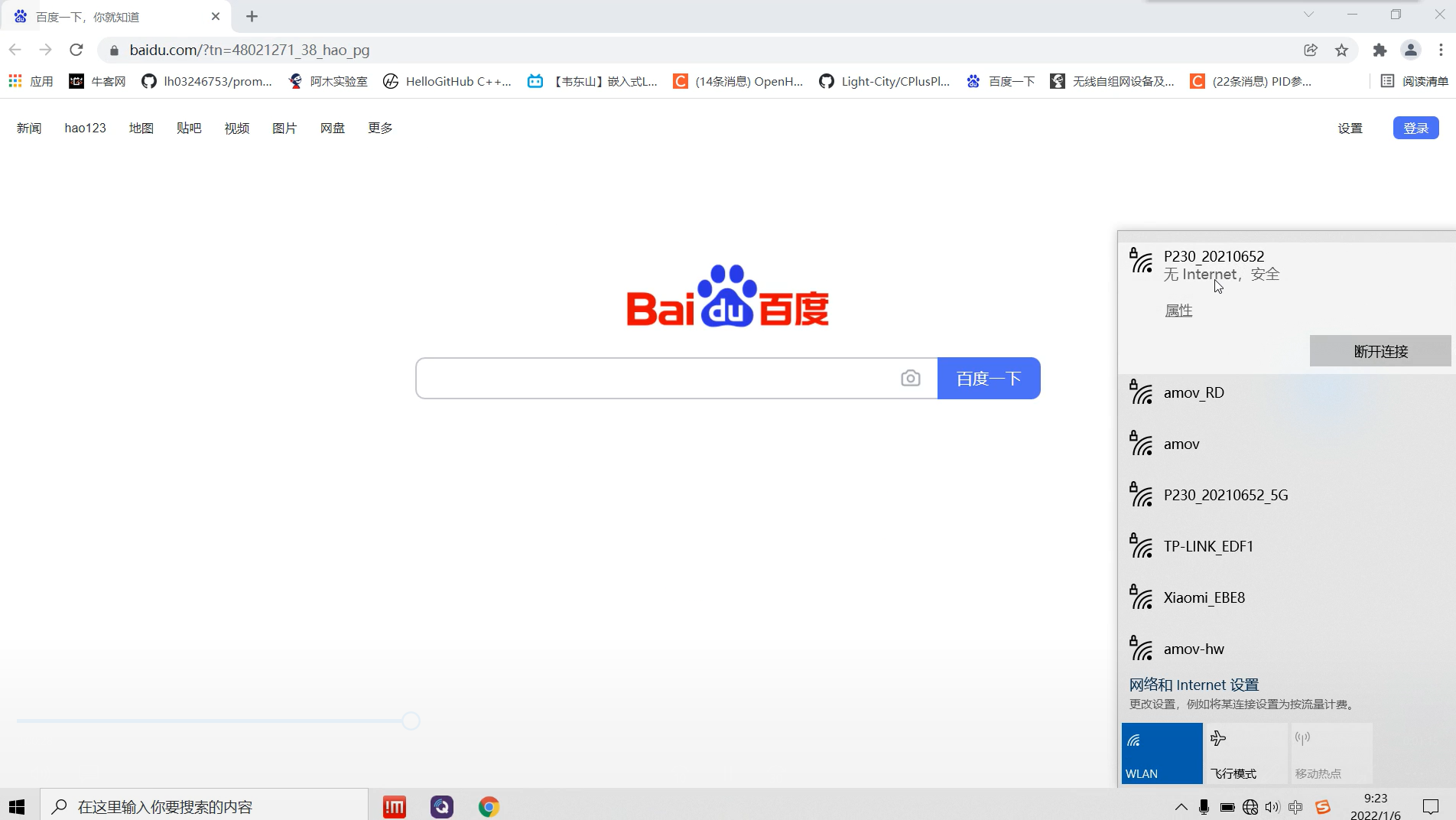
<<<<<<< HEAD 将配送的小米路由器上电后,再将飞机上电。用电脑连接到小米路由器 的wifi,wifi名为P230_xxx(XXX为飞机编号)。
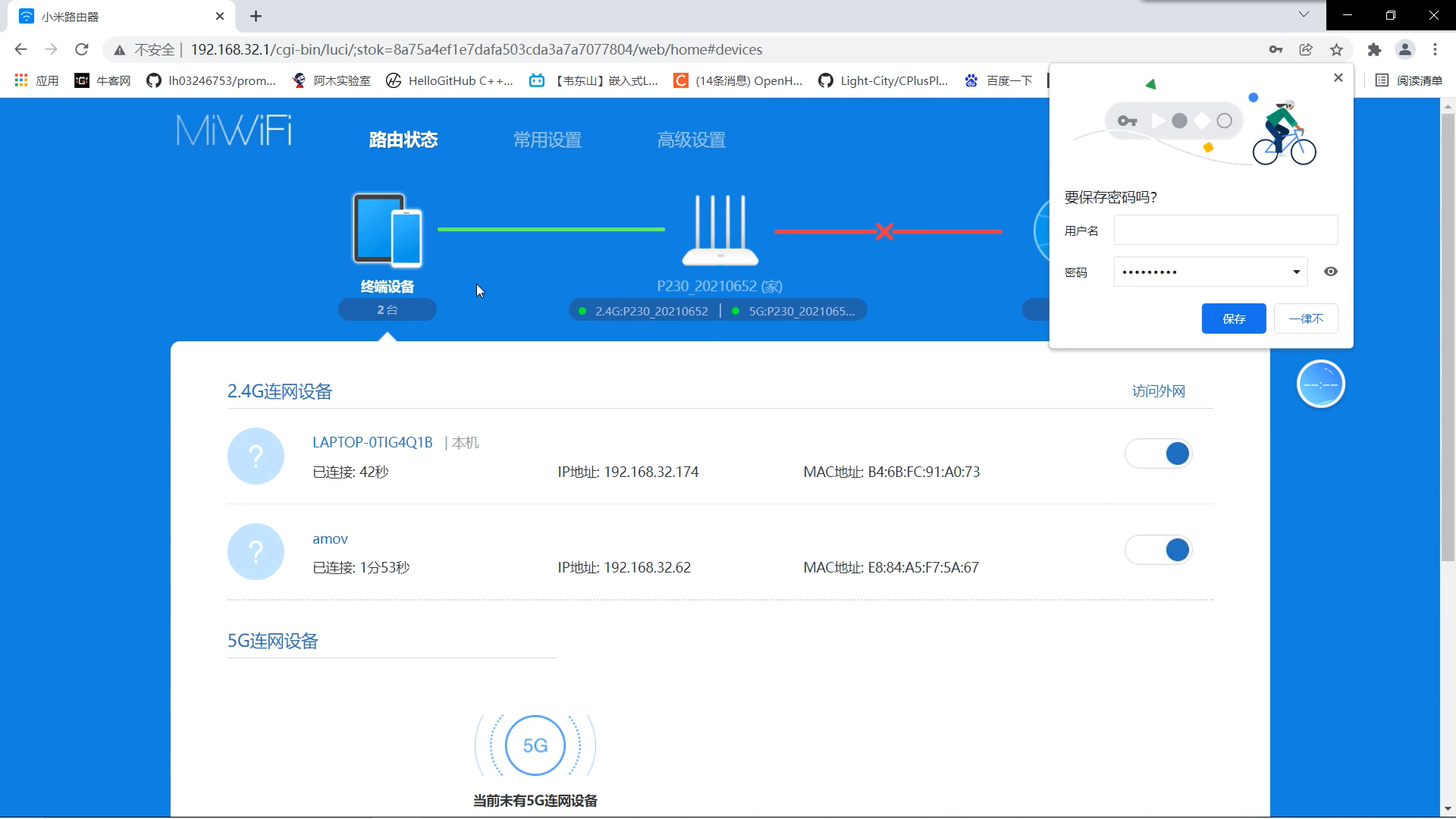
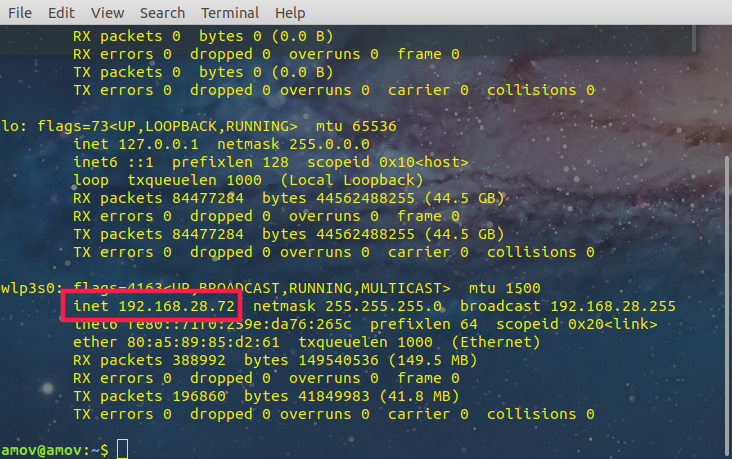
打开谷歌浏览器,进入小米路由器的Web设置页面,IP为192.168.32.1, 点击终端设备,即可查看到连接到网络的终端和对应的IP地址。
- >>>>>>> 0062772ab2728a1b1b3219f1cd829f063b93b084
- alt
None
- align
center
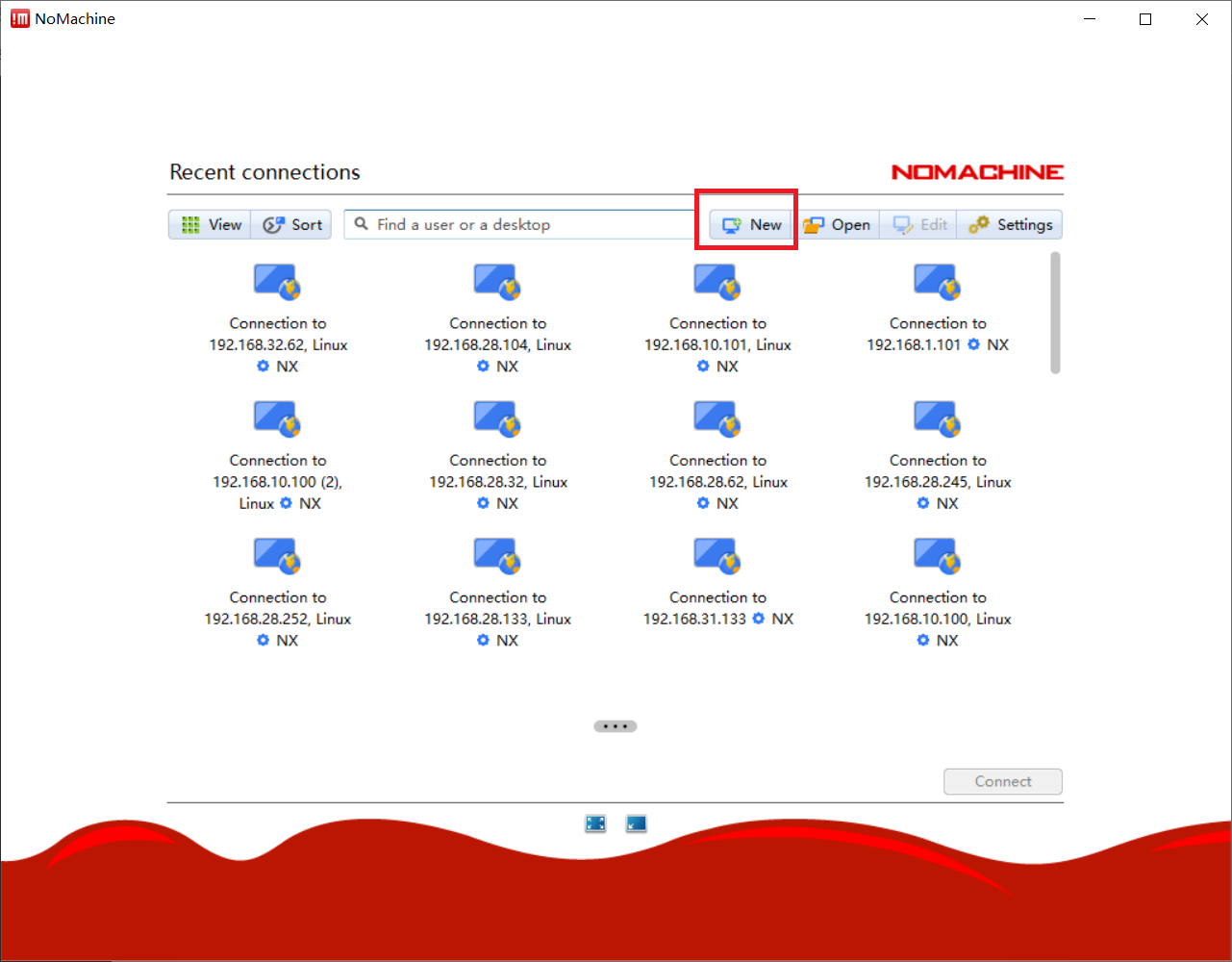
nomachine远程连接板载计算机
点击New
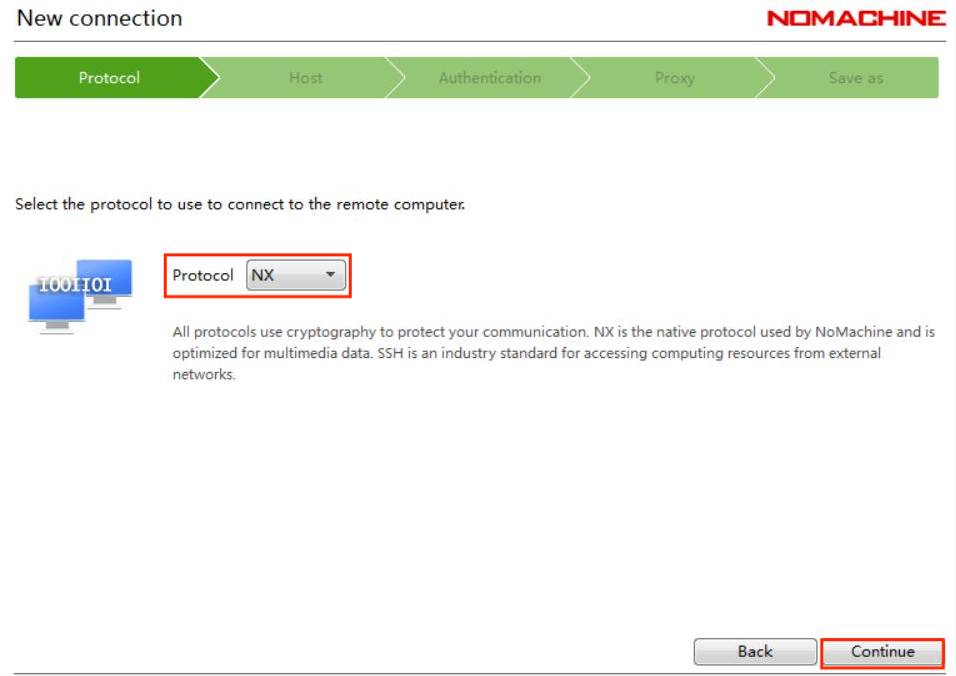
在Protocol下选择NX,点击Continue。
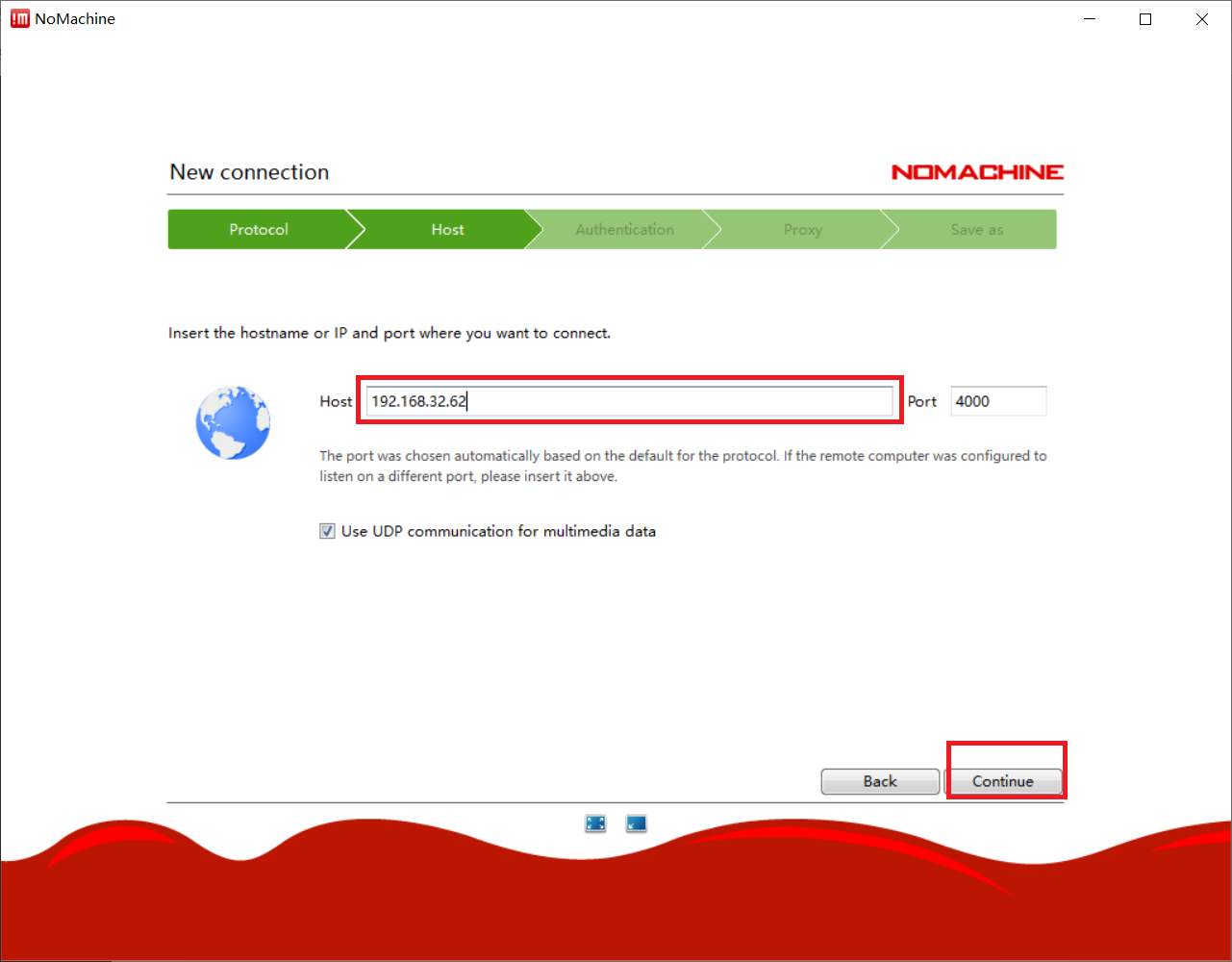
在“Host”下填写板载计算机的ip地址,板载计算机地址参考步骤2,“Port”下默认4000。
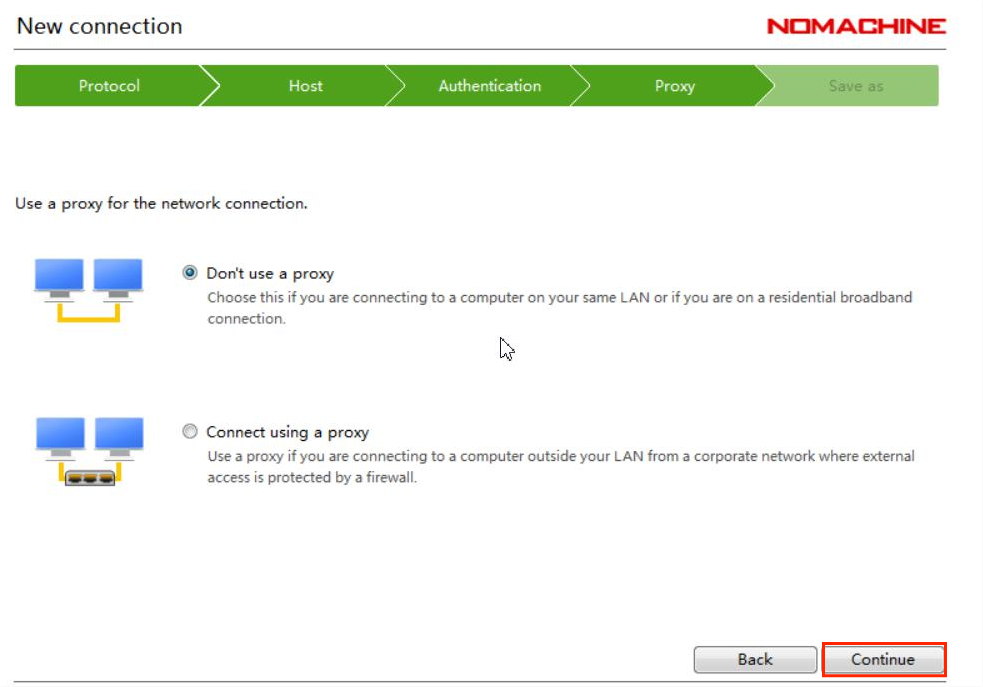
在Proxy下默认是“Don’t use a proxy”,点击“Continue”。
在Save as下会生成默认的name,可以不做更改,点击“Done”。
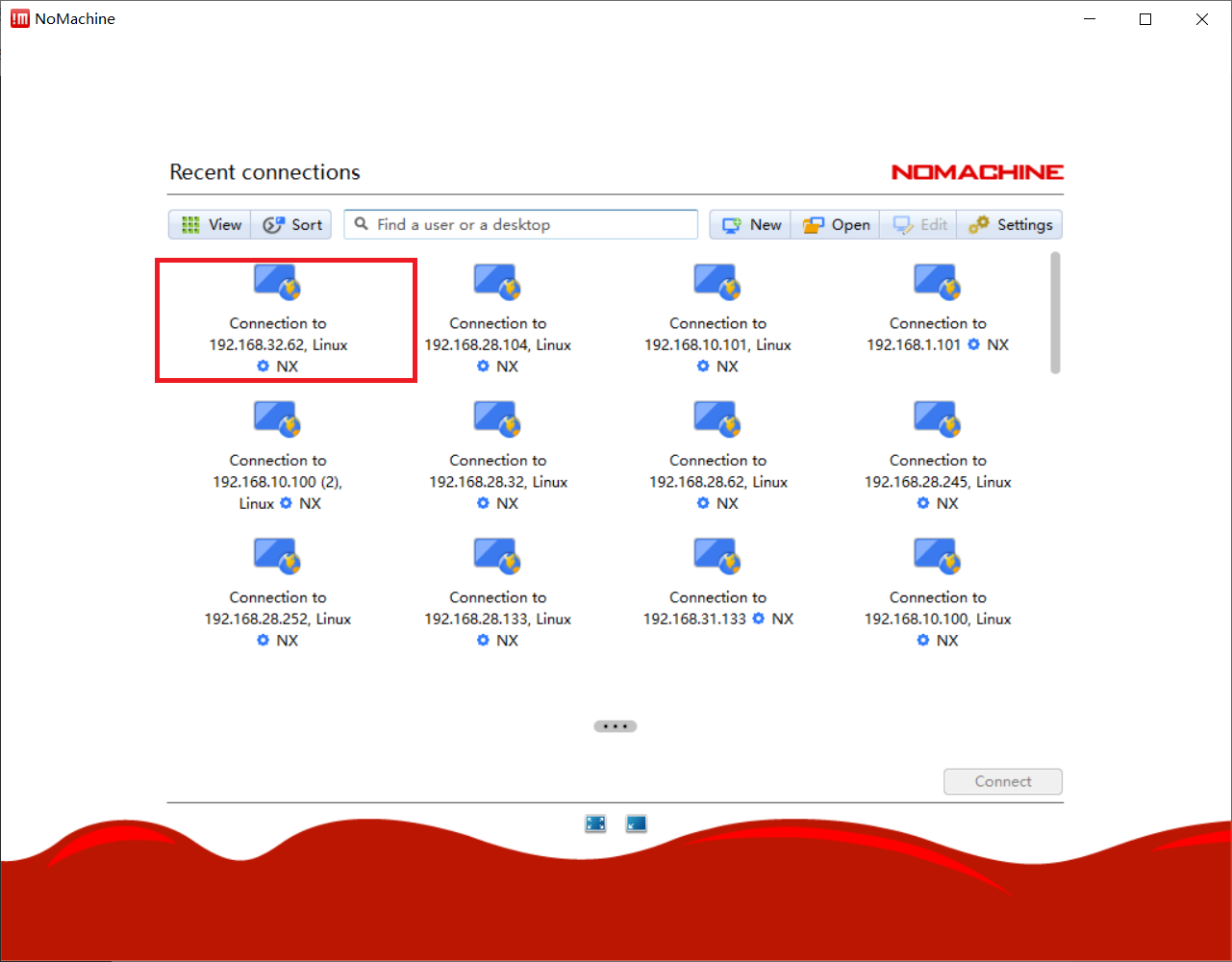
按照上述步骤操作,会自动生成如下图所示用红框标起的链接,点击“Connect”。
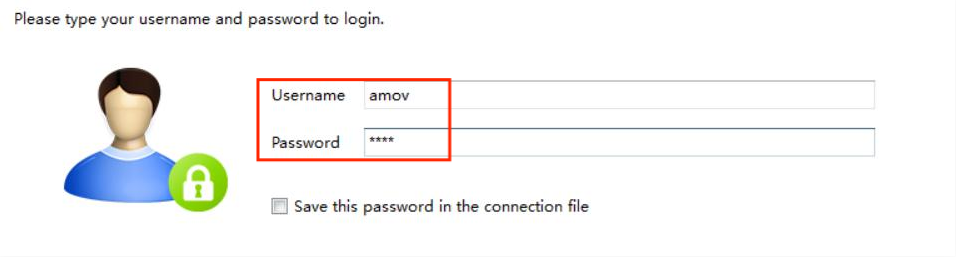
在“Username”和“Password”下输入“amov”
Nomachine成功连接板载计算机后会显示如下界面

6.校准
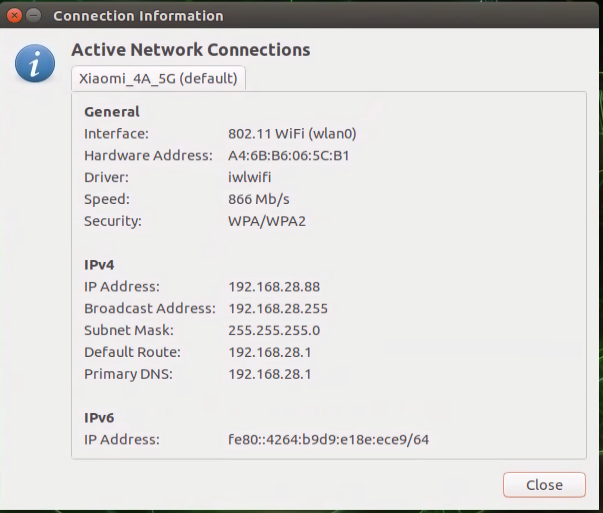
不同于P450的wifi数传,P230并不携带数传,我们需要通过UDP的方式连接到地面站。 这里的IP地址是自己主机的IP地址,并且需要在一个局域网内。
然后修改p230_vio_onboard_vins.launch文件中的内容,把如下图所示的地址更改为使用者主机的ip地址:
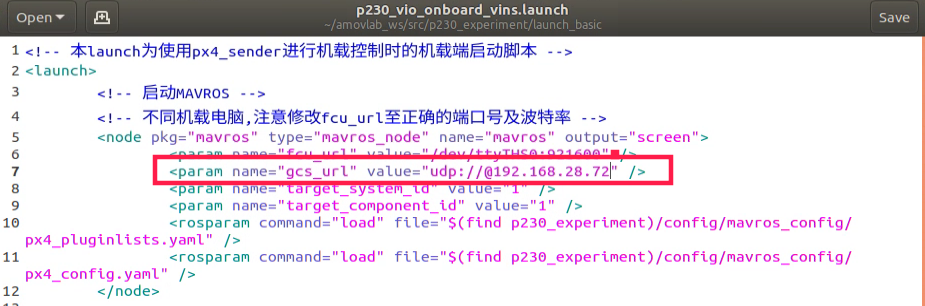
在终端执行roslaunch p230_experiment p230_vio_onboard_vins.launch,就可以连接到地面站。
需要校准的传感器如下:

注意
如果做无人机室内测试,需要在地面站修改参数EKF2_AID_MASK,EKF2_HGT_MODE,详细操作如下:
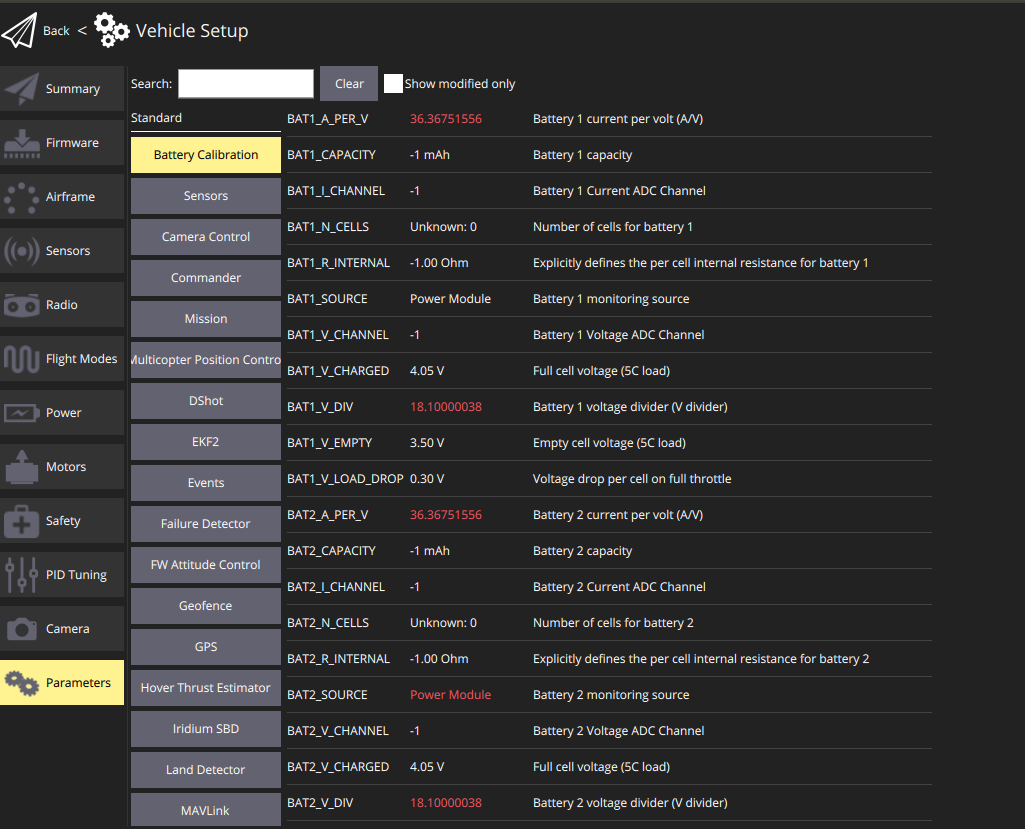
首先点击参数(Parameters)按钮,进入参数修改界面,如下。
在search栏输入aid,选择EKF2_AID_MASK参数

在窗口右上侧会弹出子页面,如下图所示。
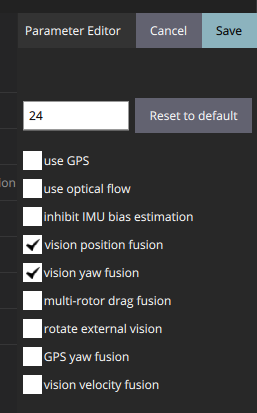
一般默认选择第一项use GPS,由于我们室内飞行使用的是T265作为位置定位源,所以需将此参数改为4、5项,修改后保存。
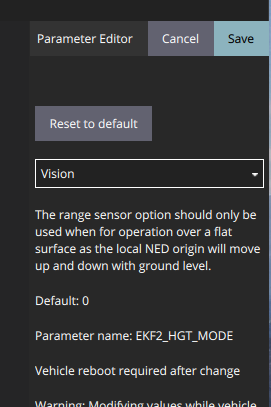
在search栏输入hgt,选择EKF2_HGT_MODE参数栏
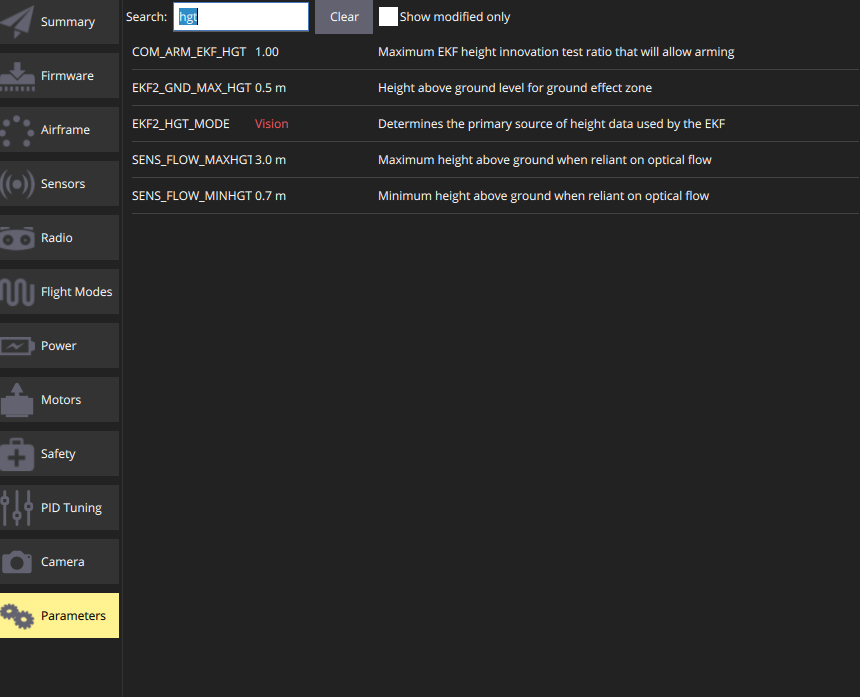
在窗口右上弹出的子页面上,点击下拉菜单,选择vision,如下图所示
在执行飞行之前,都需要检查参数和检查飞机桨叶是否上紧,检查螺丝是否有松动。 一般传感器参数我们都会调整好,但运输过程可能会对飞机产生影响。这时就需要自己调整参数。 调整完,记得重启飞控。
最后保存退出,记得重启飞控。
至此 那么我们已经做完了飞行前的所有工作,接下来我们就可以进行定点和指点飞行。