5-进阶功能-室外指点飞行
本节主要讲解P450系列无人机在室外的指点飞行演示。视频紧接上节内容 首次飞行 ,默认已经通过WiFi数传连接到QGC地面站和nomachine远程连接到板载计算机, 主要分为一下几点进行讲解:摄像头标定,二维码检测确认,坐标系确认,启动指令,起飞,降落,以及最后的视频演示。
注意
受限于开源飞控硬件性能,飞机在长时间不用后会出现位姿漂移,要求每次飞行前电池重新上电以重启飞控和板载计算机,并严格按照wiki规范操作,避免炸机风险。
启动指令
注意
在室外操作时,注意在QGC地面中查看自己的位置源是否更改,参数EKF2_AID_MASK设定为use gps,EKF2_HGT_MODE设定为Barometric pressure。
在启动脚本前,我们需要在QGC中先将飞控重启一下,操作如下,
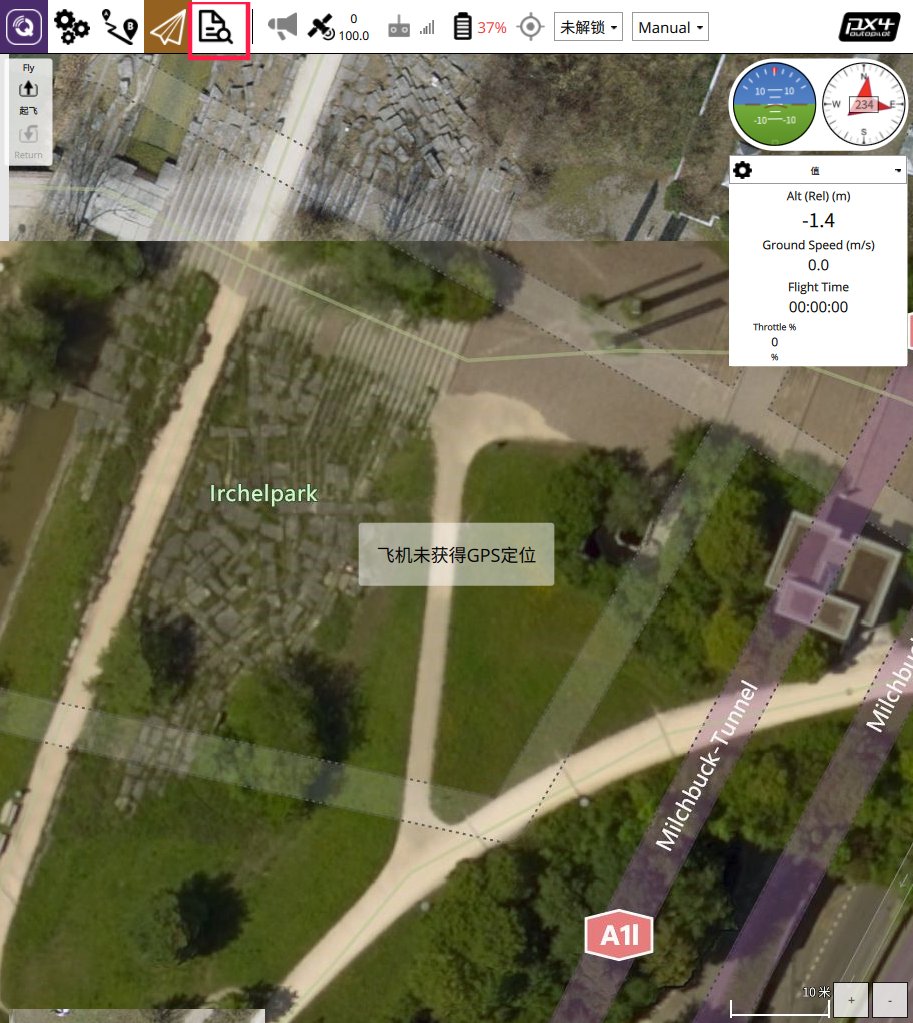
点击红框所圈出的图标,进入如下界面
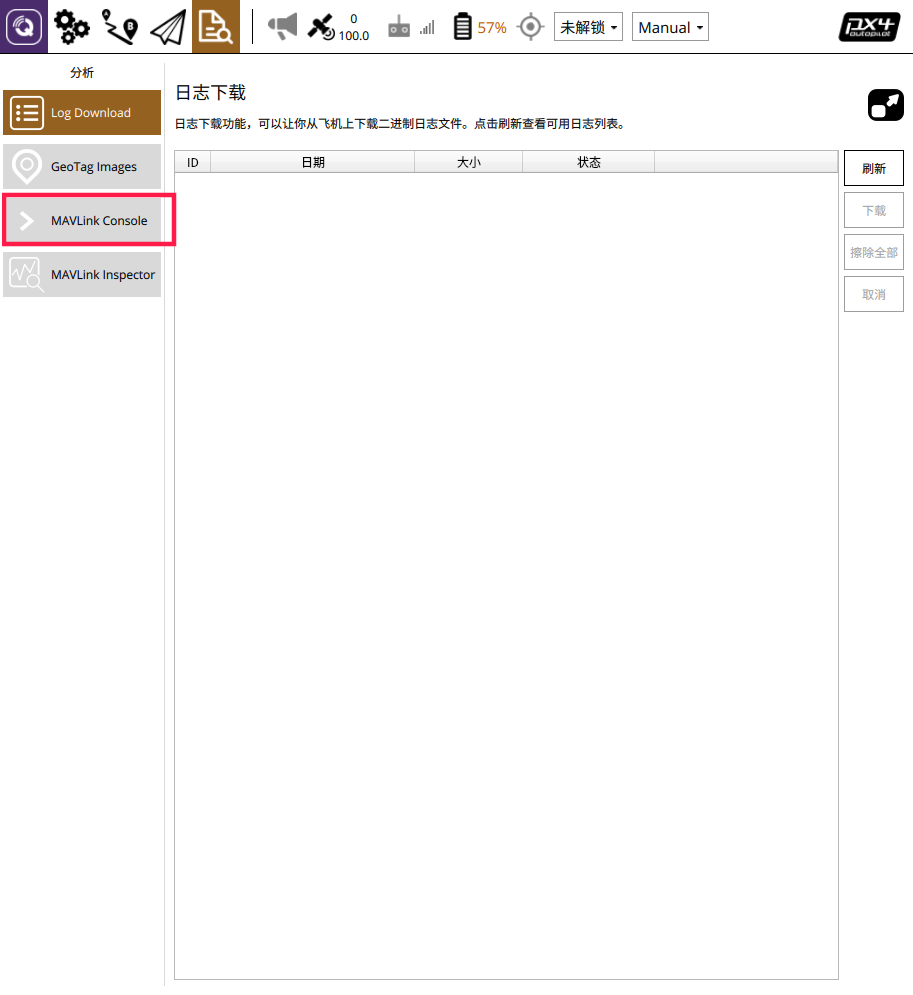
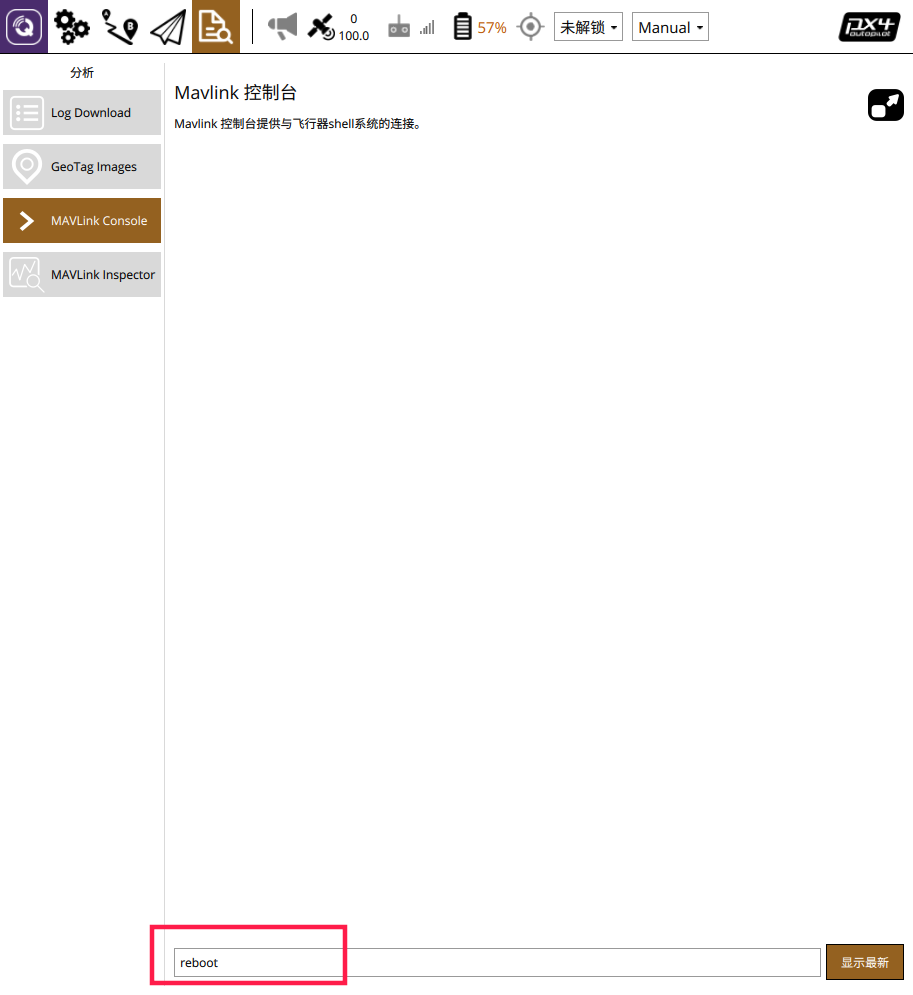
选择MAVLink Console,进入MAVLink控制终端,输入reboot,回车,听到飞控重启的提示音,即重启飞控成功。
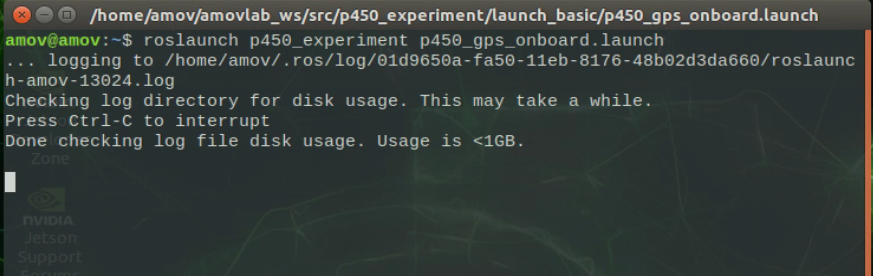
首先启动基本gps脚本
roslaunch p450_experiment p450_gps_onboard.launch
然后再启动控制脚本
roslaunch p450_experiment p450_gps_control.launch
之后会出现终端控制界面,提示有两种控制的输入方式,第一种是通过命令输入控制方式,另外一种是通过键盘按键控制方式。
两种方式都可以控制无人机,一般在做实机实验过程中选择第一种通过命令输入控制方式;第二种键盘控制不太安全。接下来会详细讲解如何使用第一种命令输入控制方式实现指点飞行。
命令行控制终端详解
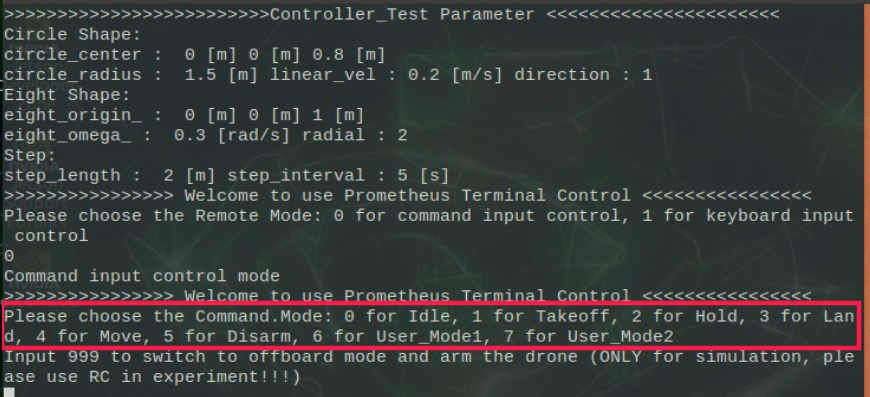
其中 0 表示的是 怠速;意思就是飞机会进入offboard模式,但是在该模式下,没有对飞机进行任何指令的发送。飞机也不会有任何动作。这个指令一般也可以不用。
1 表示的是 起飞;起飞点为当前点,起飞高度通过 yaml参数设置,单位是米,默认起飞高度是0.5m
2 表示的是 悬停;飞机正在飞行过程中如何接受到 2 指令,会在当前时刻进入悬停状态。
3 表示的是 降落;降落速度通过 yaml参数设置,单位是m/s ,默认降落速度为0.2m/s 。还有一个 上锁高度 到达上锁高度之后飞机会进入飞控的本身降落模式进而缓缓着地, 上锁高度通过 yaml 参数进行设置,单位是米,默认是 0.18m,即认为离地不到20cm的时候进入飞控本身的降落飞行模式。
4 表示的是 move模式;该模式就包含我们所称的指点飞行功能,在此模式下,又有5种子模式: 0对应XYZ_POS,空间位置控制; 1对应XY_POS_Z_VEL,水平面位置控制,高度速度控制; 2对应XY_VEL_Z_POS,水平面速度控制,高度定高控制; 3对应XYZ_VEL,空间速度控制; 5对应TRAJECTORY,轨迹跟踪控制。
常用的模式为0空间位置控制(指点飞行),接下来会讲讲实机过程中起飞的具体实现。
指点飞
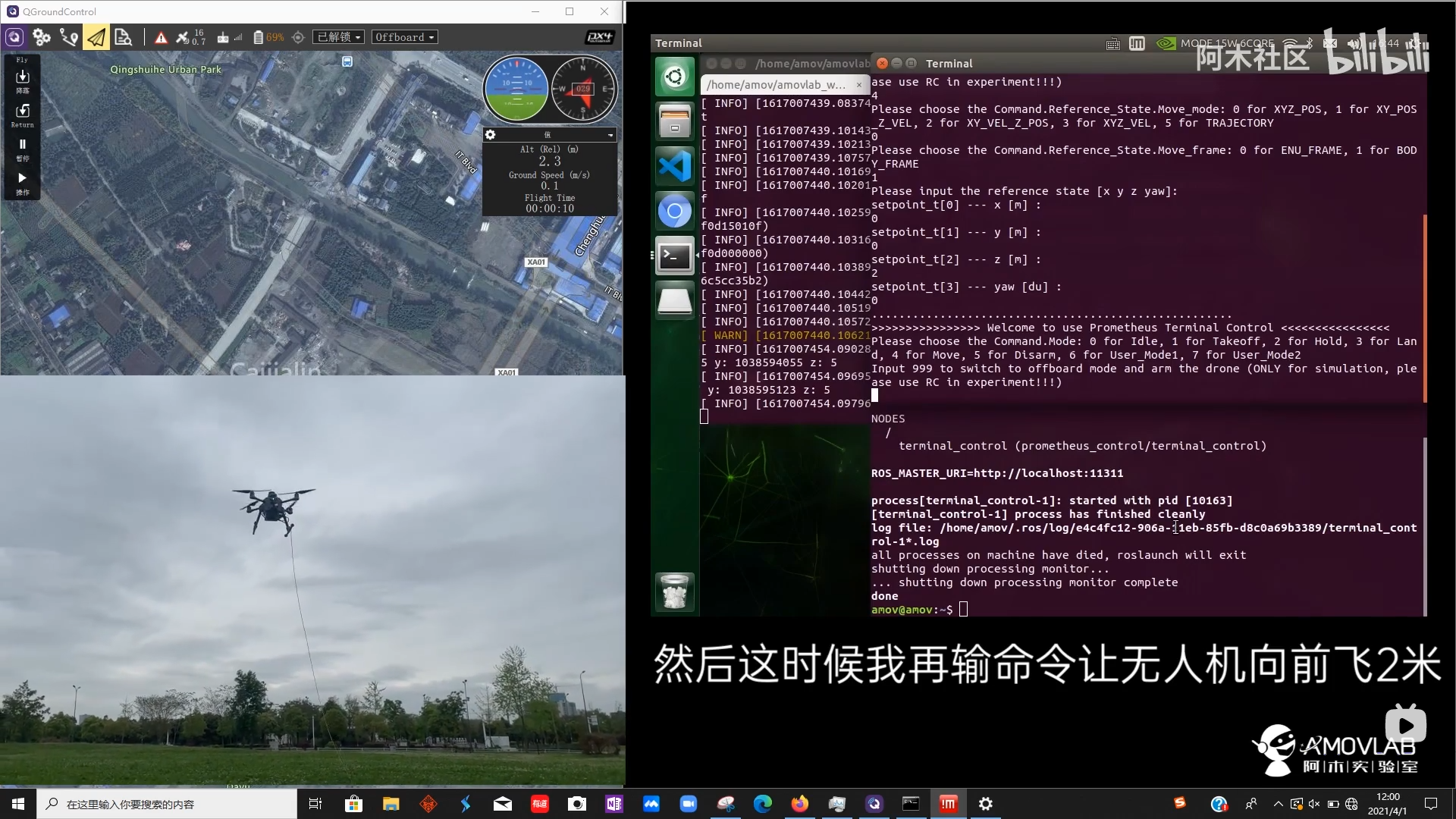
然后我们在此命令行控制终端,根据终端提示,首先输入4并敲回车 ,表示选择move模式;然后输入 0 并敲回车,表示选择空间位置控制;然后输入 0 并敲回车,表示选择ENU_FRAME惯性坐标系;然后依次输入期望的位置坐标值(即ENU_FRAME惯性坐标系下的坐标,单位为米)x,y,z和航向角yaw(一般为0)。
对坐标系做下说明:
ENU_FRAME惯性坐标系始终以无人机初始上电点为原点,且x轴指向无人机机头方向,y轴指向无人机正左方,z轴指向无人机正上方,单位为米。给无人机发送绝对期望位置选择这个坐标系。
BODY_FRAME机体坐标系始终以无人机本身为原点,无论无人机飞到哪里都是以无人机当前位置为原点,且x轴指向无人机机头方向,y轴指向无人机正左方,z轴指向无人机正上方,单位为米。给无人机发送相对期望位置选择这个坐标系。
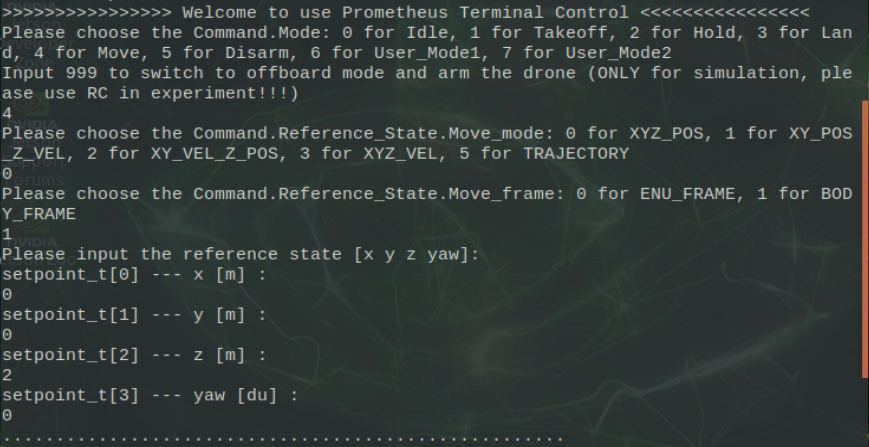
这里我们发送的期望位置是BODY_FRAME机体坐标系下x为0,y为0,z为2的坐标点,偏航yaw为0,表示让无人机飞到相对于当前点往前(x轴)0m,往左(y轴)0m,往上(z轴)2m的期望位置,航向角保持不变。
在输完期望航向角并敲回车后,我们再遥控器定点模式(SWC拨杆切到中档)下解锁并切到offboard模式(SWD拨杆切到下档),无人机会自动起飞到发送给PX4飞控的期望位置点。
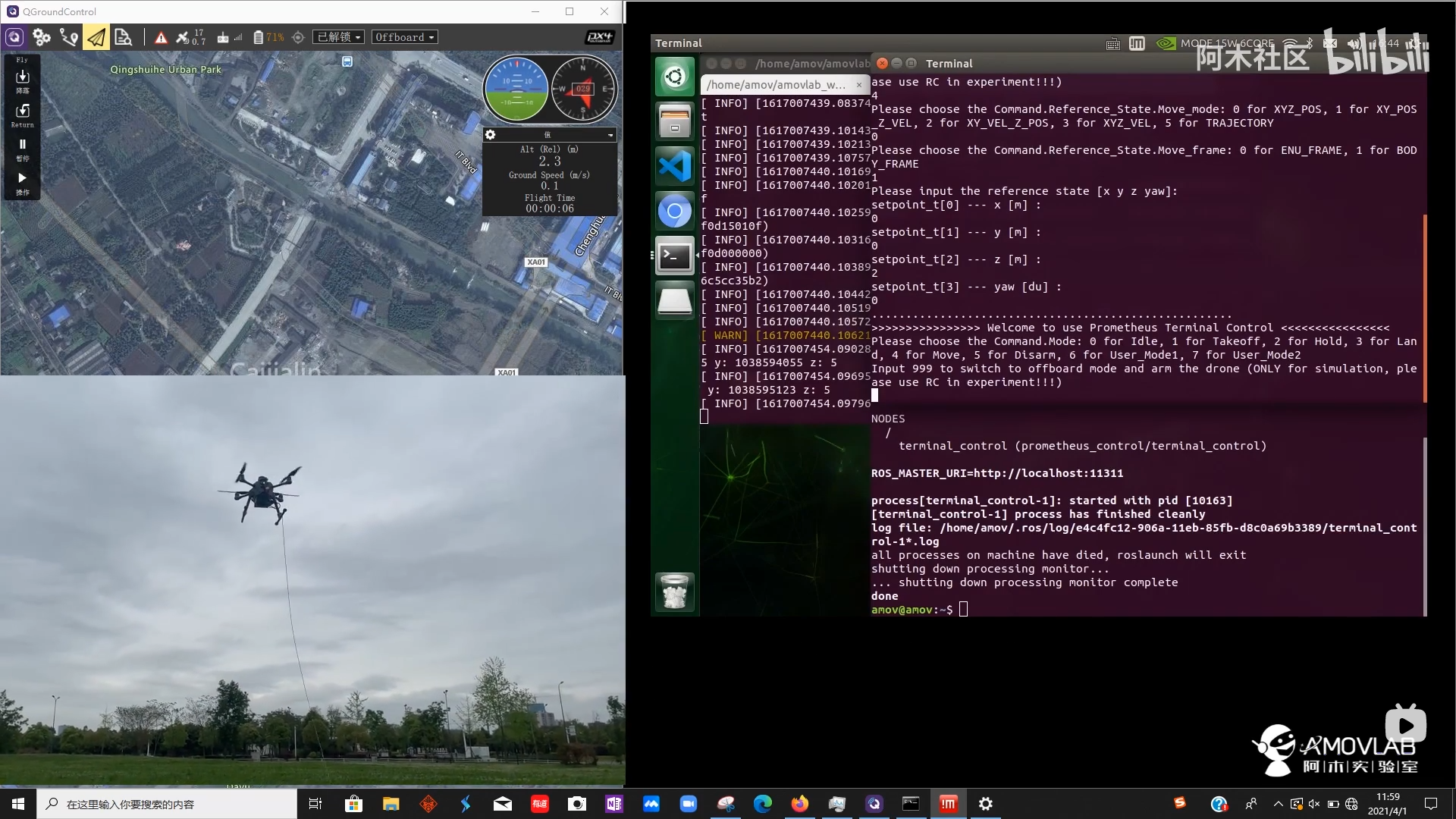
无人机飞到期望位置点之后,我们还可以继续在终端进行指点飞行操作,让无人机飞往下一个期望位置点。
需要降落时我们可以将遥控器SWD拨杆切至上档退出offboard模式,飞控会自动进入position模式(注意SWC拨杆是一直保持在中档,不需要动),然后我们可以手动操控无人机降落。