5-进阶功能-框选跟踪飞行
本节主要讲解P600系列无人机在室外的框选跟踪飞行演示。视频紧接上节内容 首次飞行 ,默认已经通过home图数传连接到QGC地面站和nomachine远程连接到板载计算机, 主要分为以下几点进行讲解:启动指令,命令行控制终端详解,起飞,指点飞,以及最后的视频演示。
警告
受硬件更新的影响,老版跟踪代码无法使用。当前为新版(2022年1月5日后到货),新版实际操作和与视频讲解有部分不同(不用担心,新版变得更简单,更易于实现)。 以文字版为准
启动指令
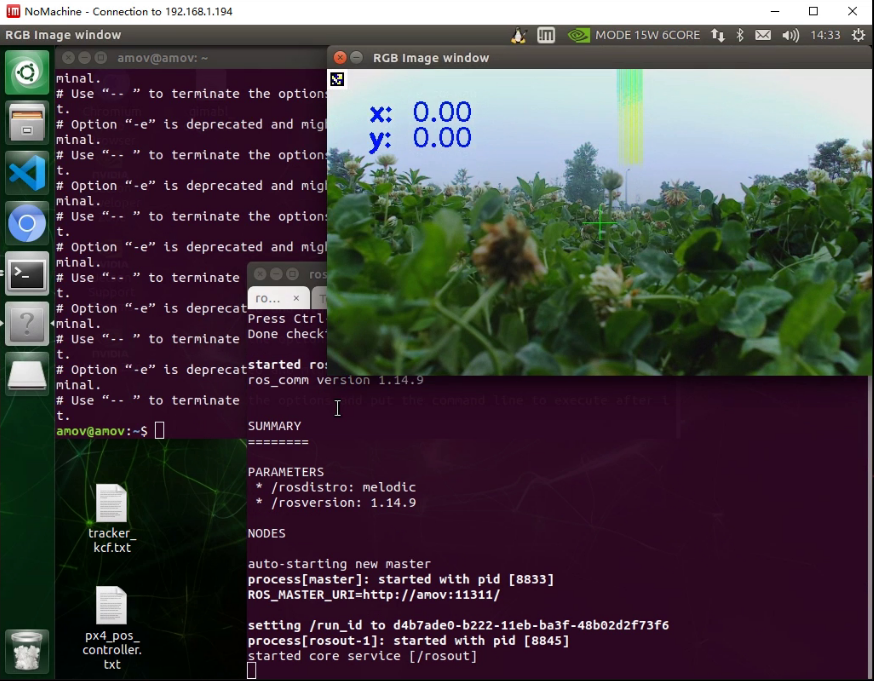
首先启动基本脚本。 总共会打开4个窗口,最后一个窗口可能稍慢些
/home/amov/track_ws/src/px4_command/sh/sh_for_P200/fly_tracking_outdoor.sh

终端输口入
待吊舱图像弹出后,依次检查各个终端是否有报错。
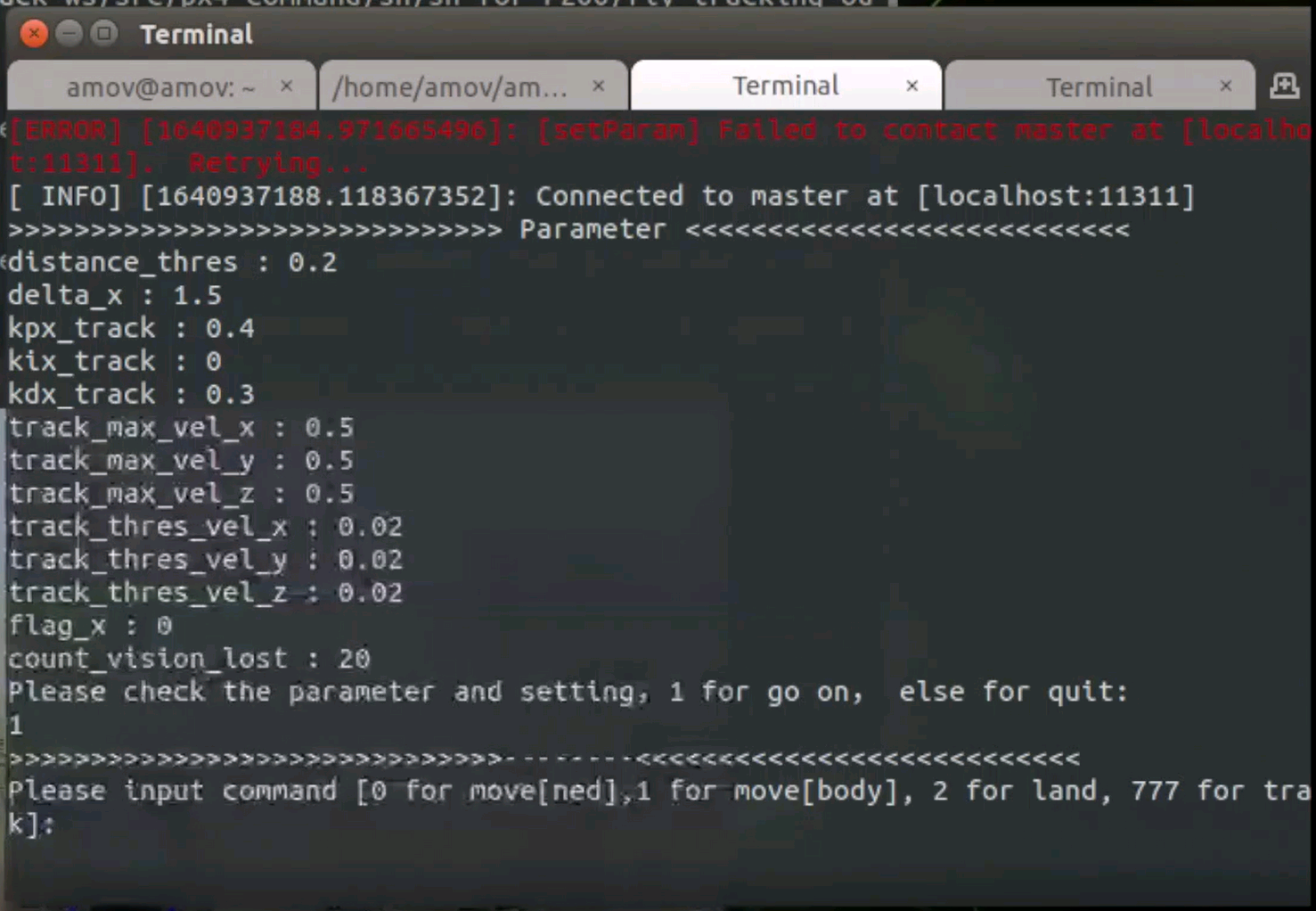
没有问题后先在倒数第二个终端输入1
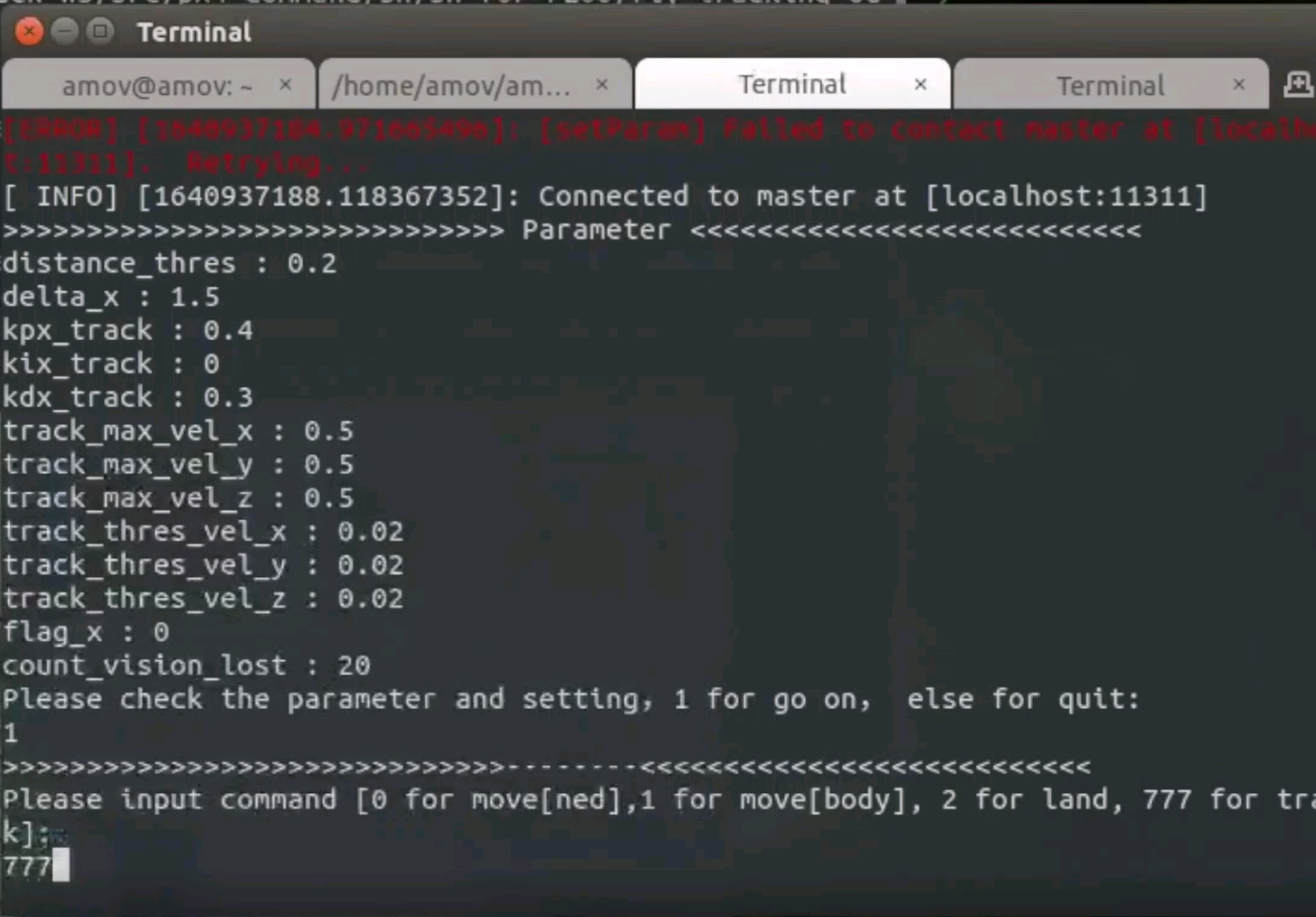
再在倒数第二个终端输入777,( 不要尝试输入其他命令,硬件更新后除跟踪外其他未测试 )
然后再遥控器切定点解锁,并手动起飞到一定高度,并让人站在机头方向,在吊舱视野范围内。
小技巧
你也可以一开始就框选目标,这样可以保证无人机在手动切定点上升的过程中吊舱仍然跟踪目标,避免无人机上升到一定高度后目标没有出现在画面中的情况。 上升到一定高度后请重新框选目标以提高跟踪准确度
框选跟踪
然后手动框选人
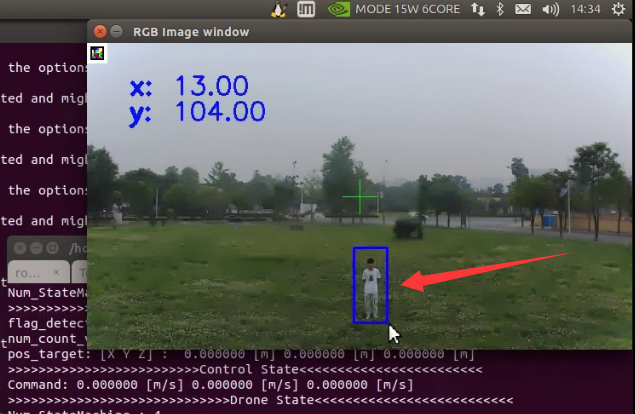
框好之后遥控器切offboard,然后无人机会开始进行跟踪,人可以进行自由走动。

结束跟踪只需要遥控器切出offboard,无人机自动进入定点,然后手动操控遥控器降落。

视频演示
视频链接: https://www.bilibili.com/video/BV17V411j7Em?p=1
视频演示如下:
常见问题
跟踪太慢,速度能否快点
打开 /home/amov/amovlab_ws/src/p600_experiment/launch_detection/p600_outdoor_target_tracking.launch 文件, 修改 kpx_track 为一个更大的直,比如 0.6。 请不要把值改的过大,以免撞脸上
...
<!-- <node pkg="mission" type="target_tracking" name="UAV_target_tracking" output="screen" launch-prefix="bash -c 'sleep 1.5; gnome-terminal \-\-tab \-\- $0 $@'"> -->
<!-- <param name="kpx_track" type="double" value="0.6"/> -->
<!-- <param name="kix_track" type="double" value="0.01"/> -->
<!-- <param name="kdx_track" type="double" value="0.3"/> -->
...
画面卡顿,模糊
检查剩余电量,供电不住会导致画面卡顿模糊。