3-吊舱控制
本节介绍吊舱控制包的使用,仅适用于吊舱开发套件(TX板)和P600无人机(NX板)使用. 演示怎么单独运行吊舱的键盘控制和吊舱跟踪.
警告
1月15之前的发货的p600产品,请联系客户获取最新的吊舱驱动代码。新代码修复卡死问题。
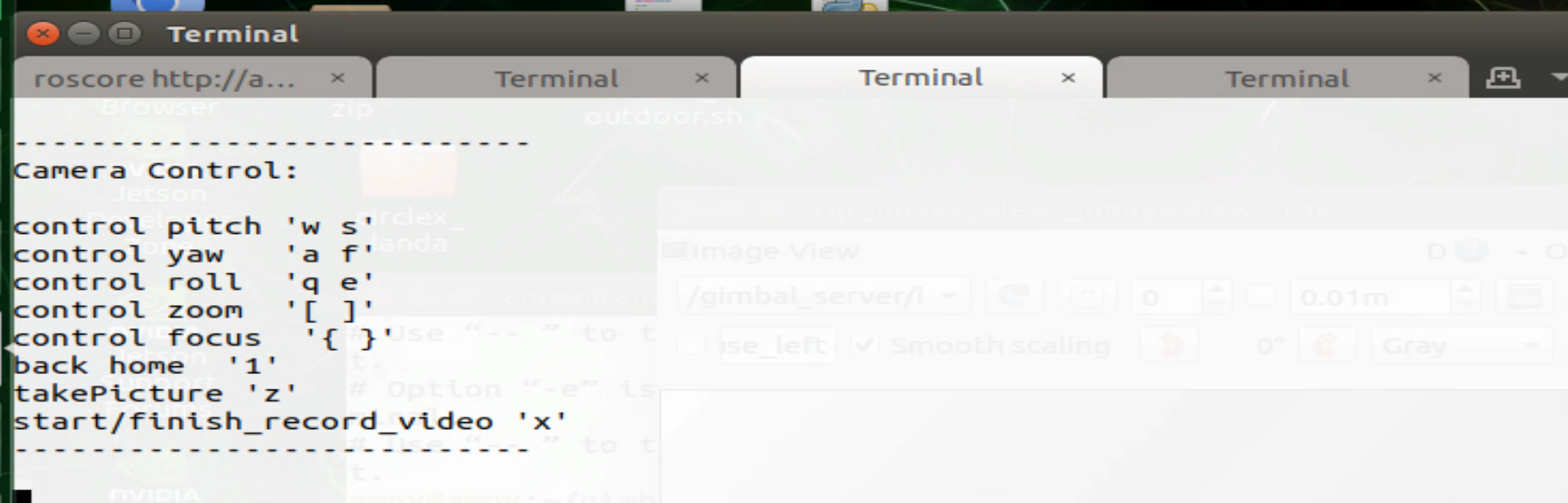
键盘控制
3轴控制, 缩放控制,变焦控制,视频拍摄
cd /home/amov/gimbal_control
chmod +x *.sh
chmod +x src/gimbal_control/scripts/control_server.py
./test_keyboard_control.sh
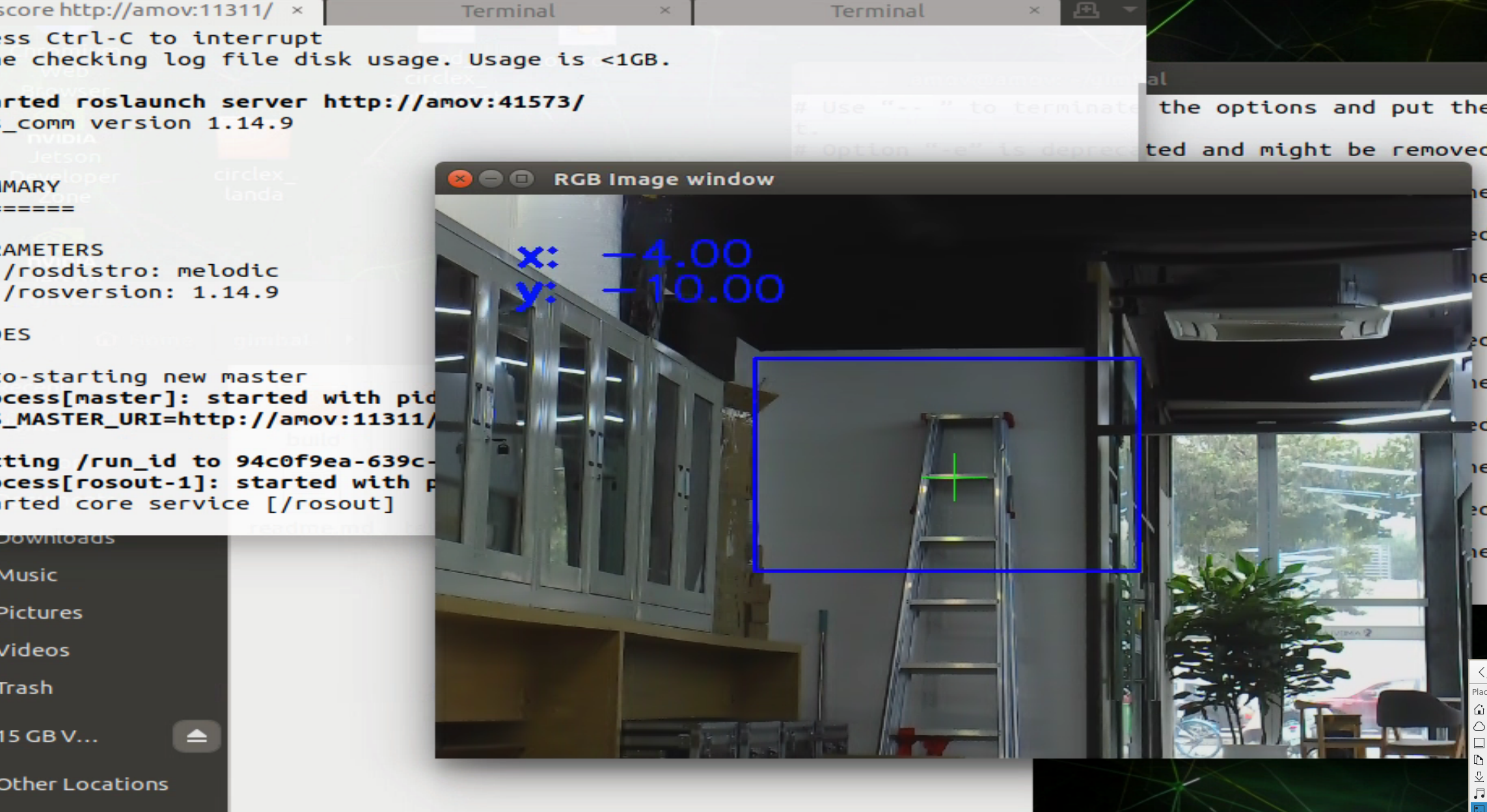
吊舱跟踪
跟踪时自动缩放
cd /home/amov/gimbal_control
chmod +x *.sh
chmod +x src/gimbal_control/scripts/control_server.py
./test_kcf.sh
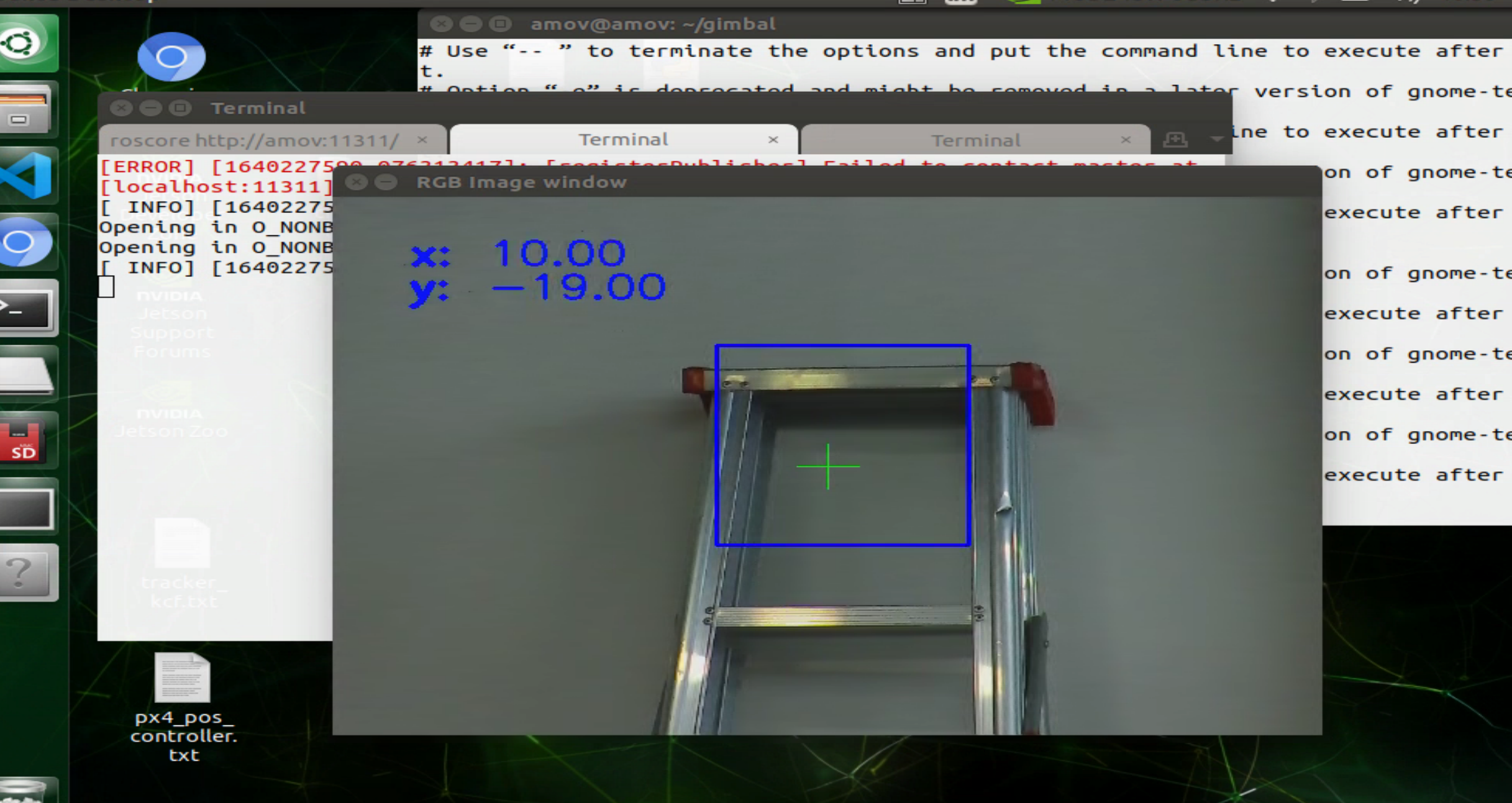
框选一个较小的目标
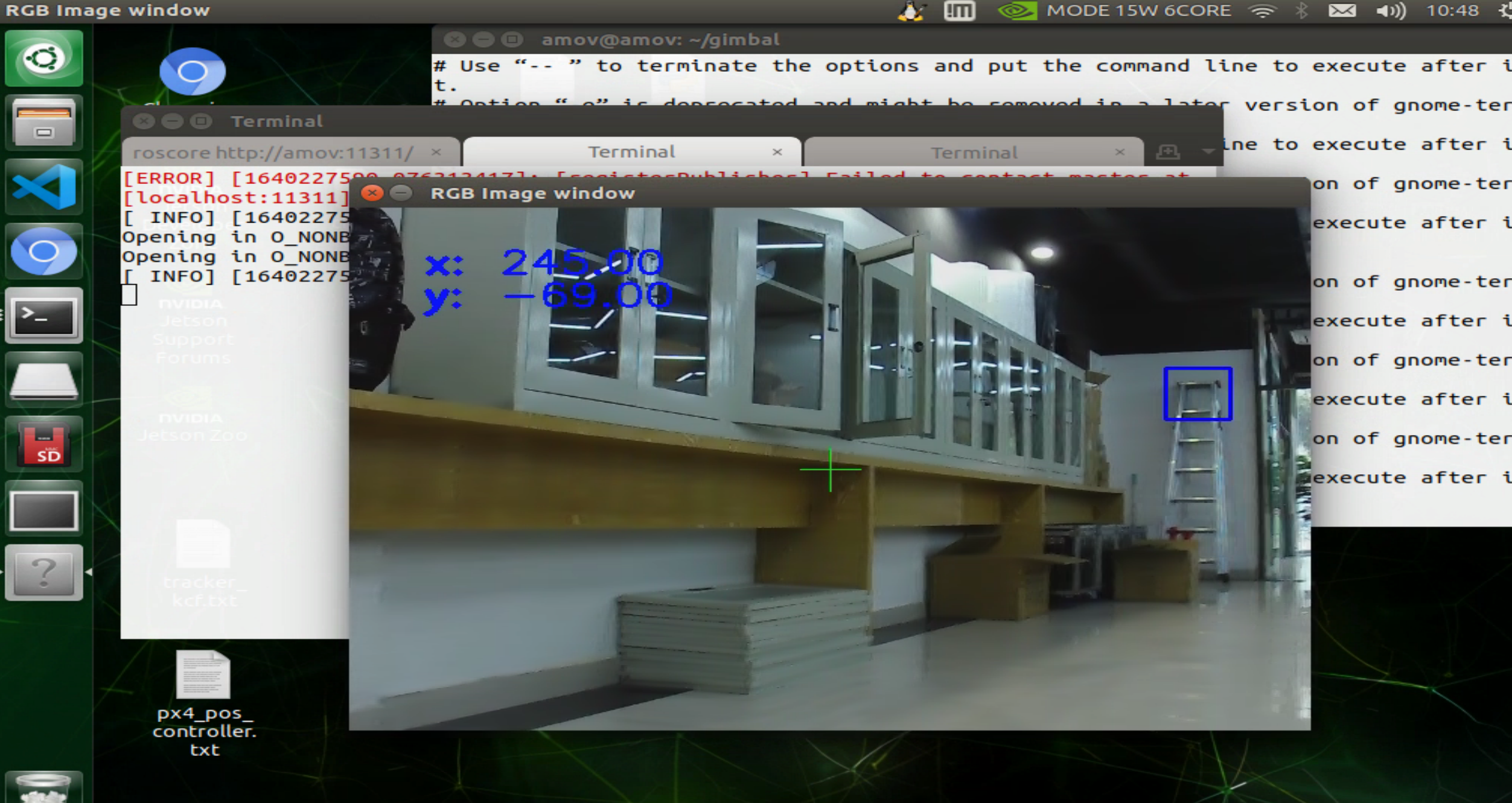
之后,自动放大
框选一个较大的目标
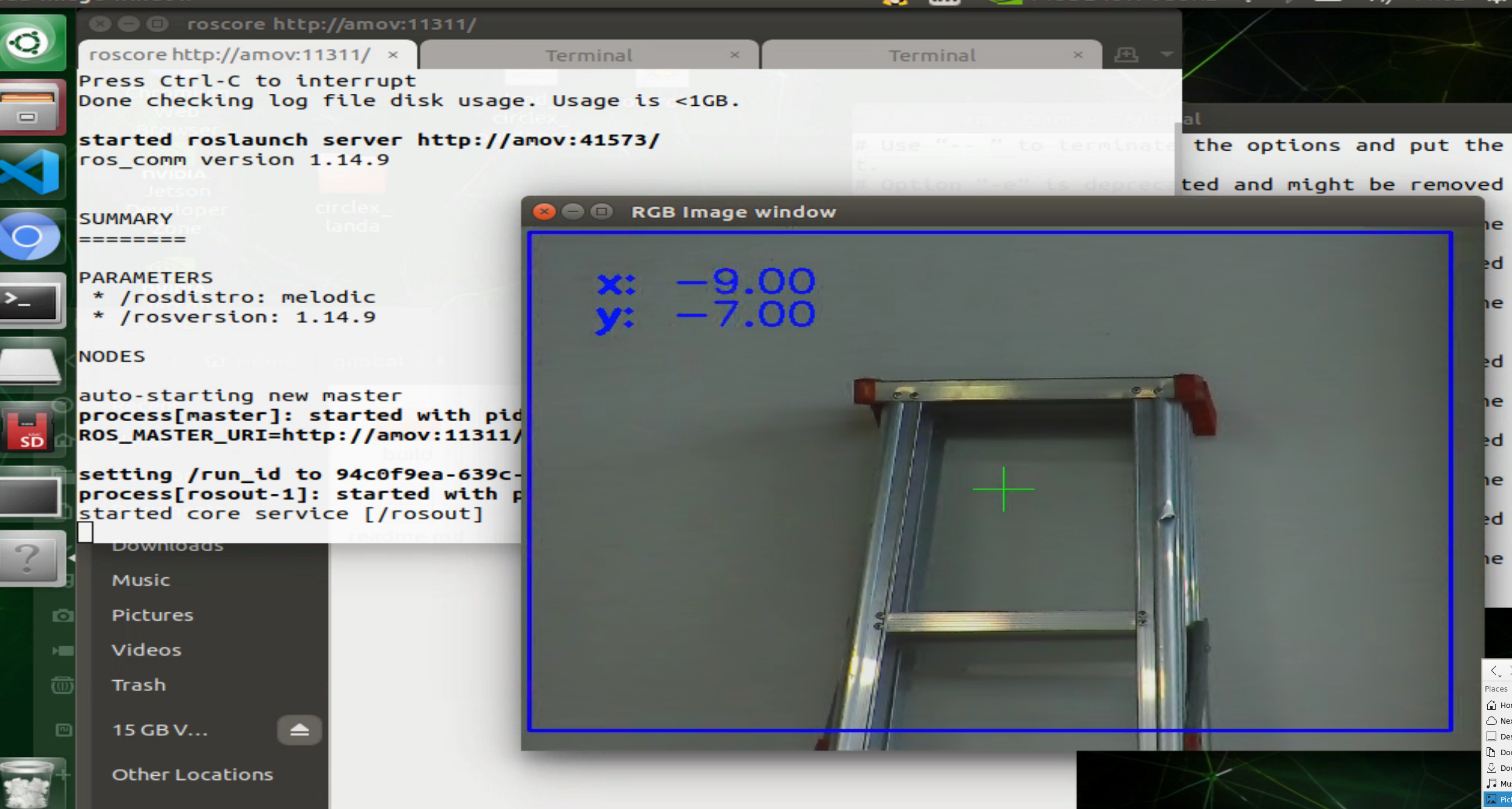
之后,自动缩小
常见问题
无法控制吊舱
打开终端运行 ls /dev 检查是否存在多个 ttyUSB 串口,如果存在多个,手动修改 test_kcf.sh 和 ./test_keyboard_control.sh 文件切换打开的ttyUSB
例如,修改为 ttyUSB1 :
...
rosrun prometheus_gimbal_control gimbal_server _tty_url:=/dev/ttyUSB1
...
备注
吊舱和激光雷达默认读取串口都是 ttyUSB0 ,如果只插入其中一个就会有问题,但当两着同时存在时总有一个会由 ttyUSB0 变成 ttyUSB1 (按插入顺序变化,一般来说两者同时存在时激光雷达时ttyUSB0, 吊舱是ttyUSB1) 而程序还是读取的 ttyUSB0
无法打开摄像头,摄像头不存在, OpenCV Error
重新上电吊舱电源
不想在跟踪中自动缩放
在 test_kcf.sh 改 _auto_zoom:=true 为 _auto_zoom:=false
...
rosrun gimbal_track tracker_kcf _auto_zoom:=false _max_size:=0.3 _min_size:=0.1
...